

3.4.Эпюры внутренних сил
Эпюра-чертеж, график, диаграмма
Правило применяемое при построении эпюр внутренних сил
Изучаемый стержень строится в масштабе длин
Значения рассма-емого усилия откладываются в соответ-ии с масштабом перпендикулярно базе(оси стержня или линиям параллельным оси стержня)
Положительное значение всех усилий кроме изгиб-го момента отклад-ются вверх от базы
Известен ряд методов построения эпюр, мы ограничемся 1-аналит-ким и 2-х приближ-ых методов построения эпюр.
Аналитический метод построения эпюр усилий
Предусматриваются след этапы реш-я аналитич-им методом
Определяем опорные реакции (если это необходимо)
Определяем кол-во участков
Участками наз. Часть длины изучаемого стержня границами которого явл-ся точки приложения сосредоточенных сил или моментов , а так же точки меняется хар-ер распределенной нагрузки.
В пределах каждого участка а. проводим сечение которое разделяет на лев и прав и показ-ем расс-е от края стержня до изучаемого сечения.
Можно показ как слева так и справа
Одностороннюю распре-нную нагрузку ( относящуюся части стержня) заменяем одной или несколькими сосредоточенными силами
Рассматриваем равновесие узучаемой части тела. Откуда находим выражение усилий в рассматриваемом сечении т.е получаем усилия
В соотоветствии с полученным выражением усилий вычисляем значение усилий в характерных точках и по точкам строим эпюры мусилий.
Дифференциальные зависимости между усилием и нагрузкой
Дифференциальные зависимости между усилиями и нагрузками
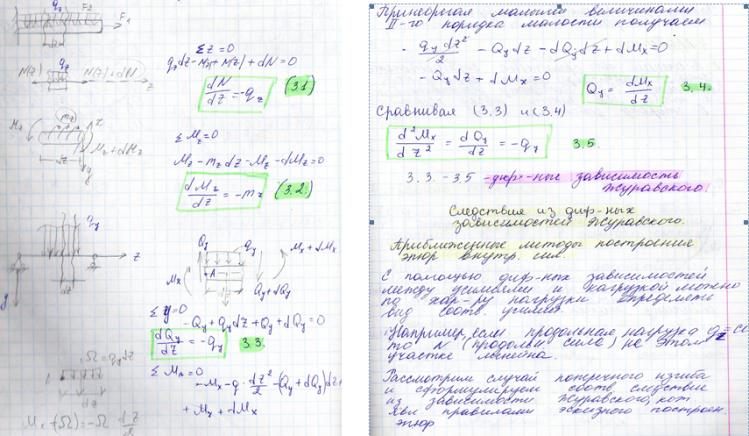
Из математики известно, что при суммировании диффер.величин разного порядка малости можно пренебрегать величинами более высокими порядками малости. Дифференциальная зависимость Журавского позволяет определять закономерность попречной силы и изгиб момента
 =-q(z)(3.5)
=-q(z)(3.5)Правилами предусматривается постр-е слева направо: 1)В месте приложения сосрдоточен.силы эпюр Qy имеет скачок на величину силы в сторону действия силы, а Mxв точку перелома в строну действия силы.2)В точкесосредоточ.переломн.момент Mxимеет скачок на величину момента( на Qy непосредств.влияния не оказывает). 3) На участках, где q действует ↓( где Qyполож.)Эпюр Qy,Mx нисходящая 4)Тангенс угла составленного осью z и касательной к эпюреQy(Mx), проведённый в изучаемом сечении=соответ.значению q(Qy)
Метод вычисления усилий на границе участков Заключается в том, что значение усилий мы вычисляем по границам участков, а в педелах участков эпюры прорисовываем по эскизным правилам. Метод наложения:Предусматривает, что мы строим Эпюру от каждого силового фактора в отдельности, а потом суммируем Эпюры )накладываем одну на др. с учётом знаков)
Определение максимального усилия по длине стержня Для расчёта прочность требуется определить наиб.по длине стержня велечину кажого усилия. При этом, если исп-ся метод границ участков , то сечение,где поперечная сила имеет знак Экстрэмум Mx определяется аналитически. Необходимо подсчитать экстен.величину Mx на первом участке она будет в сечении где Qy =0 Определяем максим. Величину Mx по длине стержня.
Глава 4. Напряжение и деформация. Последующий этап расчета на прочность стержня это определение опасных точек в опасных сечениях (в точках, где напряжение будет наибольшим). 4.1.Напряжение в поперечном сечении стержня 4.1.1. Классификация напряжения сечения стержня
* рисунок
Полное напряжение можно разделить на компоненты или составляющие * рисунок
Rz= (4.1)
Rz
– индекс полного напряжения
(4.1)
Rz
– индекс полного напряжения
 – норм.напряж,действ.перпенд.к сеч.
– норм.напряж,действ.перпенд.к сеч.
 – касат.напряж,действует в плоскости
сечения (кН/см2)
– касат.напряж,действует в плоскости
сечения (кН/см2)
 (4.2)
Примечание:
1)
первый индекс определяет нормаль к
площадке, второй индекс определяет
напр-е вдоль соответствующей оси
2)
правило знаков
(4.2)
Примечание:
1)
первый индекс определяет нормаль к
площадке, второй индекс определяет
напр-е вдоль соответствующей оси
2)
правило знаков
 положит.,если действ.от сечения
Касат.напряж-е
положит-но, если вып-ся 2 усл-я:
1)внеш.нормаль
совпадает с положит.напр.оси z
2)
совпадает с положит.напр-м др.оси
положит.,если действ.от сечения
Касат.напряж-е
положит-но, если вып-ся 2 усл-я:
1)внеш.нормаль
совпадает с положит.напр.оси z
2)
совпадает с положит.напр-м др.оси
4.1.2. Интегральные зависимости между усилиями и напряжениями.






 4.3
– интегральные зависимости м\уусилиями
и напряжениями
х,у-координаты
изучаемой точки
Интегральные
уравнения равновесия
(статич.ур-я)
Примечание:
1)Мы не
можем выразить напряжение через усилия
до опред-я закона о сечении, для этого
следует рассмотреть геом-е и
физич.зависимости
2)В зависимости
(4.3) координаты и усилия берутся со своим
знаком.
4.3
– интегральные зависимости м\уусилиями
и напряжениями
х,у-координаты
изучаемой точки
Интегральные
уравнения равновесия
(статич.ур-я)
Примечание:
1)Мы не
можем выразить напряжение через усилия
до опред-я закона о сечении, для этого
следует рассмотреть геом-е и
физич.зависимости
2)В зависимости
(4.3) координаты и усилия берутся со своим
знаком.
4.2.Деформация стержня.
4.2.1Классификация параметров деформации стержня
* рисунок
Условно предположим, что в процессе деформации стержня изучаемый параллепипед послед-но претерпевает: 1)послед-е перемещение 2)поворот 3)изм-е мин-х размеров 4)искажение форм Рассмотрим деформация в пл. zOy 1)Поступат-е перемещение: *рисунок
U,V,W
(проекции перемещения на коорд.ось) –
линейные перемещения или компоненты
перемещения (смещения)
[L]-длины
1-й степени
знак + если перемещение
направлено в положит-ю сторону
соответствующей оси
В отдельных
случаях сопротивления стержня компоненты
перемещения носят специфич.наименование,
а именно при осевом напряж-и или сжатии
и наз.абсолютная
деформация стержня.
При
поперечном или чистом изгибе перемещ-е
вдоль оси у наз.прогиб.
2)Поворот
изучаемого параллепипеда вокруг
координатной оси или точнее ребер,
параллельных координатам, обозначается
 (угловые перемещения)
(угловые перемещения)
* рисунок
Угол
поворота (компонент углового
перемещения)
Размерность-рад
Знак-положителен
Наблюдается
поворот против часовой стрелки.
Примечание:
при кручении
 наз.углом закручивания
3)Изм.линейных
размеров
наз.углом закручивания
3)Изм.линейных
размеров
* рисунок



 – линейны
деформации, характеризующие изм.линейных
размеров изучаемого параллепипеда.
Размерность – безразмерная величина.
Знак – лин.деформация положительна
при удлинении ребер параллепипеда.
Примечание:
лин.деформация также наз.относит.лин.деформация
а отличии от абсолют.лин.деформации.
– линейны
деформации, характеризующие изм.линейных
размеров изучаемого параллепипеда.
Размерность – безразмерная величина.
Знак – лин.деформация положительна
при удлинении ребер параллепипеда.
Примечание:
лин.деформация также наз.относит.лин.деформация
а отличии от абсолют.лин.деформации.
*Рисунок
Искажение формы элемента характериз-ся искажением угло (искривление ребер пренебрегаем в силу их малости). Положительная угловая деформация соответствует уменьшению угла между положит.напр-ми коорд-х осей. Примечание: 1)Таким образом, геометрич.преобраз-я, происходящие в деформ.стержне, хар-ся перемещениями (линейными, угловыми и деформациями. 2)Следует различать 2 зачения термина деформация: а)изм-е параметров изучаемого стержня б)количеств-я характеристика интенсивности изм-я разм-в и формы
4.2.2. Геометрич.зависимости Перемещение и деформация взаимосвязаны. При этом можно выделить 2 группы геом.завис-ти: 1)завис-ти, позволяющие выразить через компоненты лин-х перемещений все остальные компоненты
* рисунок





 Примечание:
Можно получить и иную
зависимость
Примечание:
Можно получить и иную
зависимость





 Вывод:
таким образом, мы получили 9 зависимостей,
позволяющие выразить через ГбМбЦб если
такие убдут известны.
2)Вторая группа
характеризует совместную деформацию
соседних парал-в
Вывод:
таким образом, мы получили 9 зависимостей,
позволяющие выразить через ГбМбЦб если
такие убдут известны.
2)Вторая группа
характеризует совместную деформацию
соседних парал-в
*рисунок Теория упругости и эти условия деформации имеют дифференц.вид. Мы эти условия будем получать на основе эксперимента.
4.3.Понятие и физич.зависимости. Зависимость между напряж-м и компонентами деформации можно получить на основаниианализов рез-в экспериментов.
4.3.1.Закон
Гука
Можно
показать, что нормальное напряжение
влияет на изменение объема.

 В случаях простого сопротивления
эти зависимости могут иметь достаточно
простой вид:
В случаях простого сопротивления
эти зависимости могут иметь достаточно
простой вид:
 , где E,G
– коэффициенты пропорциональности,
которые наз.модуль упругости. При этом
Е-модуль продольной упругости,модуль
Юнга, можуль упругости 1го рода. G-модуль
упругости 2го рода или модуль сдвига.
, где E,G
– коэффициенты пропорциональности,
которые наз.модуль упругости. При этом
Е-модуль продольной упругости,модуль
Юнга, можуль упругости 1го рода. G-модуль
упругости 2го рода или модуль сдвига.
4.3.2.Закон Пуассона
*рисунок




 Примечание:
Можно
показать, что мех.характеристики
взаимосвязаны
Примечание:
Можно
показать, что мех.характеристики
взаимосвязаны
 Выводы: таким образом, мы получили
статические, геометрические и физические
зависимости, рассматривая которые
совместно, омжно выразить напряжения
и деформации через усилия в поперечном
сечении стержня. Эта задача решается
более просто в случае простого
сопротивления стержня.
Выводы: таким образом, мы получили
статические, геометрические и физические
зависимости, рассматривая которые
совместно, омжно выразить напряжения
и деформации через усилия в поперечном
сечении стержня. Эта задача решается
более просто в случае простого
сопротивления стержня.