

18. Требования, предъявляемые технологией к следящему эп станков с чпу. Скоростная, моментная и динамические погрешности.
Станки с ЧПУ находят применение для изготовления деталей сложных конфигураций.
Требования предъявляемые технологией к ЭП станков с ЧПУ:
Большой диапазон регулирования скорости, D≥10000. Для повышения производительности станка необходимы большие скорости ускоренного хода подвижной части станка.
Апериодический характер изменения скорости вращения.
Минимальные погрешности в работе ЭП. Погрешность в изменении нагрузки
 м,
при изменении напряжения
и,
при изменении температуры
т,при
изменении реверса
р:
м,
при изменении напряжения
и,
при изменении температуры
т,при
изменении реверса
р:

Сущ. скоростная погрешность, моментная и динамическая погрешности.
Скоростная погрешность – это погрешность возникающая при движении узла с постоянно скоростью при нагрузке равной нулю.

1 – заданные значения перемещения
2 – фактическое передвижение узла
 -
скоростная погрешность
-
скоростная погрешность
 -
добротность
-
добротность
Рассмотрим, как можно изменять добротность.
Вычертим следующую структурную схему.

WM – скорость вращения механизма
VM – линейная скорость механизма

 -
передаточная функция регулятора Р.
-
передаточная функция регулятора Р.
 -
электропривод ЭП(передаточное число
преобразователя)
-
электропривод ЭП(передаточное число
преобразователя)
 -
характеризует редукторы 1 и 2
-
характеризует редукторы 1 и 2
 -
добротность по скорости.
-
добротность по скорости.
Сущ. еще моментная погрешность – это погрешность, которая опред. нагрузкой на валу двигателя при задающем сигнале равном нулю.
 -
моментная погрешность.
-
моментная погрешность.
 -
добротность по моменту
-
добротность по моменту
 ,
где
,
где
 - угол поворота вызван.этим моментом
- угол поворота вызван.этим моментом
i – передаточное число редуктора.

 -
жесткость механической хар-ки разомкнутого
скоростного контура
-
жесткость механической хар-ки разомкнутого
скоростного контура

1 – Хар-ка замкнутого скоростного контура.
2 – хар-ка разомкнутого скоростного контура

 -
коэффициент передачи разомкнутого
скоростного контура.
-
коэффициент передачи разомкнутого
скоростного контура.
Динамическая погрешность

 -
время переходного процесса
-
время переходного процесса
 -
падение скорости
-
падение скорости
 -
динамическая погрешность.
-
динамическая погрешность.
При отработке возмущающих воздействий система должна быть быстродействующей, т.е. необходимо уменьшить tn
19. Типовая структурная схема следящего электропривода станков с чпу. Порядок наладки следящего электропривода.
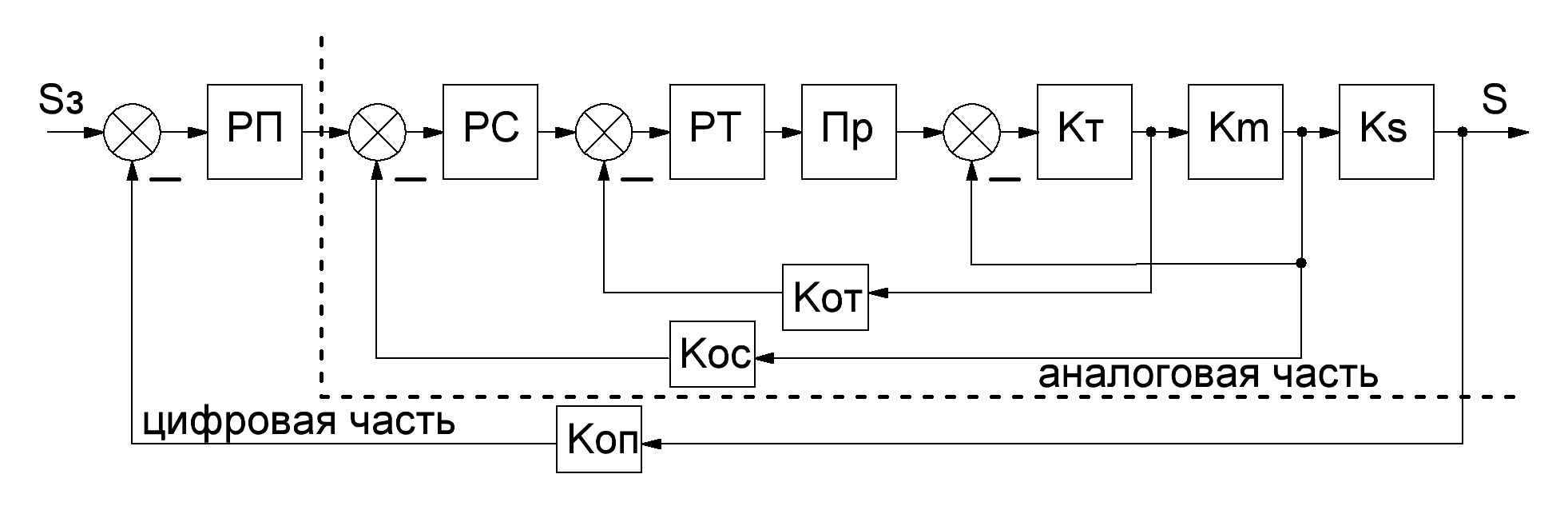
Станки с ЧПУ применяются для изготовления деталей сложной конфигурации, а также изготовление деталей мелкими сериями. Требования, предъявляемые к станкам с ЧПУ (для следящих систем): 1) большой диапазон; 2) переходные процессы должны быть апериодическими при пуске двигателя и при изменении скорости вращения; 3) минимальные погрешности (погрешности, обусловленные изменением момента, напряжения в сети, температуры, погрешность, возникающая при реверсировании); 4) Также имеются скоростная, моментная и динамическая составляющая.
Скоростная погрешность (кинетическая) определяется при движении подвижного узла с постоянной скоростью при нулевой нагрузке на валу двигателя.
1 -задание
величины перемещения подвижного узла.
-задание
величины перемещения подвижного узла.
2-фактическое перемещение механизма.

где Kv – добротность по скорости.

Р – регулятор; РД – редуктор.
 Kv
– коэффициент усиления звеньев системы,
когда входная величина является
погрешностью по скорости, а выходной –
линейная скорость перемещения.
Kv
– коэффициент усиления звеньев системы,
когда входная величина является
погрешностью по скорости, а выходной –
линейная скорость перемещения.
Моментная погрешность определяется перемещением вала двигателя за счёт действия нагрузки при отсутствии управляющего сигнала.
 Kм
– добротность по моменту (определяется
соотношением Мст
к углу поворота выходного вала
Kм
– добротность по моменту (определяется
соотношением Мст
к углу поворота выходного вала
 )
)
Динамическая погрешность возникает при отработке возмущающих воздействий.


Для уменьшения ∆φд необходимо уменьшить tпп.
Д ля
получения апериодического переходного
процесса при разгоне с а=1м/с2
необходимо менять добротность в
соответствии с кривой 1. Можно получить
апериодический переходной процесс при
постоянной Kv
и увеличении величины ускорения в
соответствии с увеличением скорости.
Кривую 1 обычно реализуют программным
способом.
ля
получения апериодического переходного
процесса при разгоне с а=1м/с2
необходимо менять добротность в
соответствии с кривой 1. Можно получить
апериодический переходной процесс при
постоянной Kv
и увеличении величины ускорения в
соответствии с увеличением скорости.
Кривую 1 обычно реализуют программным
способом.