

2. Фильтры порядковых статистиках
Виды:
*медианные фильтры
Действие этого фильтра, как следует из его названия, состоит в замене значения в точке изображения на медиану значений яркости в окрестности этой точки:
![]()
Широкая популярность медианных фильтров обусловлена тем, что они прекрасно приспособлены для подавления некоторых видов случайных шумов, и при этом приводят к меньшему размыванию по сравнению с линейными сглаживающими фильтрами того размера.
*фильтры, основанные на выборе максимального и минимального значения
Например, использование 100-го процентиля приводит к фильтру, основанного на выборе максимального знач.(или фильтру максимума)который задаётся выражением

Такой фильтр полезен при обнаружении наиболее ярких точек на изображении.
А при использовании 0-го процентиля приводит к фильтру, основанного на выборе минимального значения( или фильтру минимума), который полезен при обнаружении наиболее тёмных точек на изображении.
*фильтр серединной точки
Заключается просто в вычислении среднего между максим. и миним. значением

Этот фильтр объединяет в себе методы порядковых статистик и усреднения. Этот фильтр лучше всего работает при наличии случайно распределённых шумов, как гауссов или равномерный.
38. Адаптивные фильтры подавления шума.
Изменяются в зависимости от статистических свойств изображения внутри области действия фильтра.
* Адаптивные локальные фильтры подавления шума
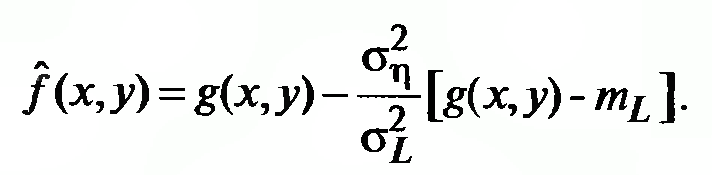
Определяется следующими условиями:
- если дисперсия шума равна 0. То отклик фильтра равен g(x, y).
- если локальная дисперсия на много больше дисперсии шума, то значение отклика фильтра должно быть больше яркости этих точек.
- если обе дисперсии принимают значения второго порядка, то отклик фильтра должен быть равен локальной средней по области.
*Адаптивные медиальные фильтры
Эти фильтры помогают справиться с импульсным шумом, вероятности которого превышают указанные значения. Дополнительное преимущество адаптивного медиального фильтра состоит в том, что такой фильтр “старается сохр. детали” в областях, искажённых не импульсным шумом.
Введём следующие понятия:
Zmin – минимальное значение яркости
Zmax – максимальное значение яркости
Zmed – медиана значений яркости в
zxy – значение яркости в теневой точке
Smax – максимальный размер области
Алгоритм фильтрации состоит из двух ветвей, обозначенных ниже как ветвь А и B:
Ветвь А: A1=zmed-Zmin
A2=zmed-Zmax
Если А1>0 и А2<0, то перейти к ветви В, иначе увеличить размер окрестности.
Если размер окрестности ≤ Smax, повторить ветвь А, иначе результат равен zxy
Ветвь В: В1= -zmin
B2=zxy-zmax
Если В1>0 и В2<0, результат равен zxy, иначе результат равен zmed.
Применяются для удаления биполярного импульсного шума, сглаживание шума в других типах. Сведения к минимуму таких искажений, как чрезмерное уточнение или границ объектов.