

Сглаживающие частотные фильтры.
Контуры и другие резкие перепады яркости на изображении вносят значительный вклад в высокочастотную часть Фурье-перобразования. Цель состоит в выборе передаточной функции, которая ослабит высокочастотные компоненты и сформирует сложное изображение.
Существует 3 типа фильтров:
- Идеальные фильтры низких частот

Недостатки: его можно реализовать только программным способом, на изображении возникает эффект звона (появление лже-контуров).
- Фильтр нижних частот Баттерворта

n – порядок фильтра.
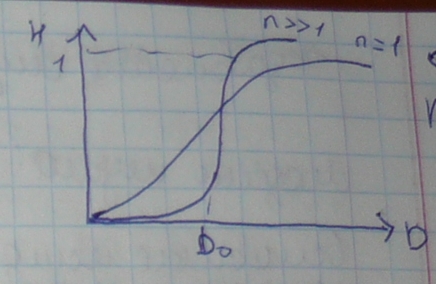
При использовании фильтра Баттерворта порядка 1 звон не возникает. Но может стать значительным при использовании фильтров более высокого порядка.
- Гаусовые фильтры низких частот

Достоинства: отсутствует эффект звона.
36. Частотные фильтры повышения резкости
Поскольку контуры и другие скачкообразные изменения яркости связаны с высокочастотными составляющими, то повышение резкости изображения может быть достигнуто частотной областью при помощи процедуры высокочастотной фильтрации.
Hвч(u, v) = 1-Hнч(u, v)
Рассмотрим идеальные высокочастотные фильтры, высокочастотные фильтры Баттерворта и гауссовы высокочастотные фильтры:
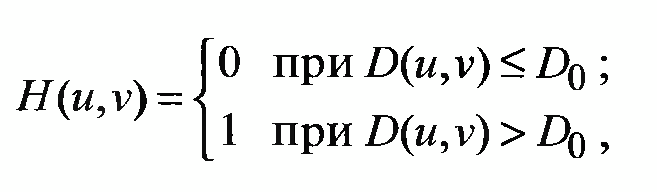
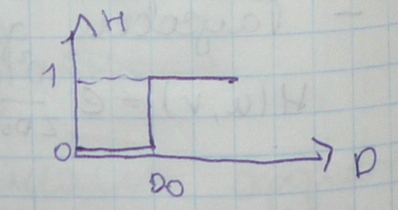
- идеальные фильтры высоких частот
- фильтры высоких частот Баттерворта

- Гауссовы фильтр высоких частот
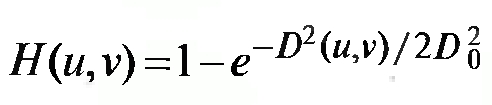
Гуассов фильтр даёт хорошее качество фильтрации даже для маленьких объектов и тонких полос.
37. Пространственные фильтры подавления шума.
Когда искажение изображения обусловлено исключительно наличием шума, равенства приобретает вид
g(x, y)=f(x, y)+ȵ(x, y)
G(u, v)=F(u, v)+N(u, v)
Усредняющие фильтры
Здесь мы кратко обсудим пространственные фильтры для подавления шума и построим некоторые др. фильтры, эффективность которых лучше.
-Фильтр, основанный на вычислении среднего арифметического
Такой фильтр, наз. среднеарифметическим, яв-ся простейшим среди усредняющих фильтров.
![]() Пусть
Пусть
 обозначает прямоуг. окрестность (множ.
координат точек изобр.) размерами m*n
c
центром в точке (x,y).
Процедура фильтрации предполагает
вычисление ср. арифм. значения
обозначает прямоуг. окрестность (множ.
координат точек изобр.) размерами m*n
c
центром в точке (x,y).
Процедура фильтрации предполагает
вычисление ср. арифм. значения
искажённого изобр. g(x,y) по окрестности
Усредняющий фильтр просто сглаживает локальные вариации яркости на изображении. Уменьшение шума происходит в результате этого сглаживания.
-Фильтр, основанный на вычислении среднего геометрического
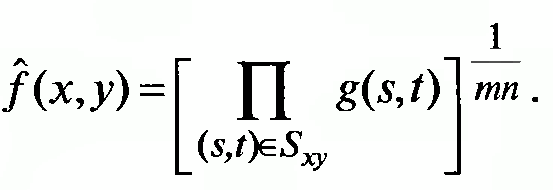 Здесь
значение восстановленного изображения
в каждой точке (x,y)
яв-ся корнем степени mn
из произведения значений в точках
окрестности
Здесь
значение восстановленного изображения
в каждой точке (x,y)
яв-ся корнем степени mn
из произведения значений в точках
окрестности
- Фильтр, основанный на вычислении среднего гармонического
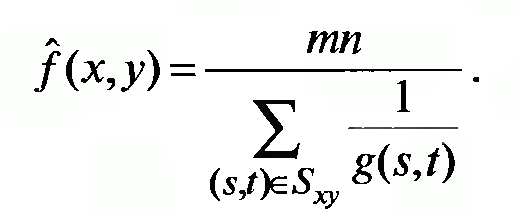 Среднегармонический
фильтр хорошо работает в случае
униполярного “белого” импульсного
шума (т.е. когда значение шума соответствует
появлению белых точек на изображении),
но не работает в случае униполярного
“чёрного импульсного шума”. Этот
фильтр также хорошо работает для др.
типов шума, таких как гауссов шум.
Среднегармонический
фильтр хорошо работает в случае
униполярного “белого” импульсного
шума (т.е. когда значение шума соответствует
появлению белых точек на изображении),
но не работает в случае униполярного
“чёрного импульсного шума”. Этот
фильтр также хорошо работает для др.
типов шума, таких как гауссов шум.
- Фильтр, основанный на вычислении контрагармонического
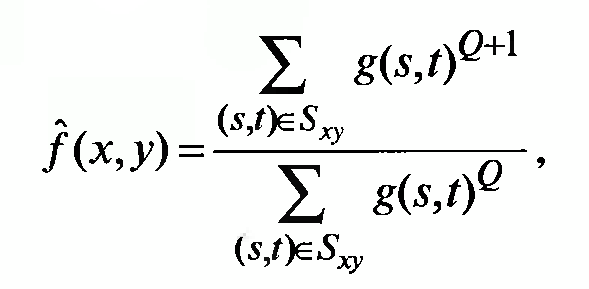 где
Q
называется
порядком
фильтра
. Этот фильтр хорошо приспособлен для
уменьшения или почти полного устранения
импульсного шума. При полож. значениях
Q
фильтр
устраняет “чёрную” часть импульсного
шума.
При
отриц-х
значениях Q
фильтр
устраняет “белую” часть импульсного
шума. Обе части шума не могут быть
устранены одновременно.
где
Q
называется
порядком
фильтра
. Этот фильтр хорошо приспособлен для
уменьшения или почти полного устранения
импульсного шума. При полож. значениях
Q
фильтр
устраняет “чёрную” часть импульсного
шума.
При
отриц-х
значениях Q
фильтр
устраняет “белую” часть импульсного
шума. Обе части шума не могут быть
устранены одновременно.