

Тема: 1. Основные понятия и аксиомы статики
1. Какая система сил называется уравновешивающейся?
а) если под действием системы сил тело движется прямолинейно
б) если под действием системы сил тело движется равноускоренно
в) если существует система эквивалентная заданной
г) если под действием системы сил твёрдое тело остаётся в состоянии покоя
д) если действующие силы не меняются с течением времени.
__________________________________________________________________
2. Что надо знать для характеристики силы?
а) характер её действия
б) точку её приложения
в) взаимодействие заданной силы с твёрдым телом
г) величину силы, направление её действия, точку приложения силы
д) равнодействующую этой силы.
__________________________________________________________________
3. Из заданных предложений выбрать аксиому статики:
а) Аксиомы выражают свойства сил, действующих на твёрдое тело;
б) Совокупность сил, действующих на тело, называется системой сил;
в) Две силы, приложенные к твёрдому телу, взаимно уравновешиваются, если их модули равны и если они направлены по одной прямой в противоположные стороны
г)
Если сила
![]() заменена силами
заменена силами
![]() и
и
![]() ,
то их называют составляющими силами
,
то их называют составляющими силами
д) Уравновешивающаяся система сил эквивалентной нулю.
__________________________________________________________________
4. Что называется системой сходящихся сил?
а) Совокупность сил, линии действия которых пересекаются в одной точке
б) Система сил, равнодействующая которых является диагональю параллелограмма
в) Если в результате взаимодействия этих сил возникают опорные реакции
г) Если при взаимодействии этих сил возникают идеальные связи
д) Если известно направление силы взаимодействия заданной системы сил.
__________________________________________________________________5. Что называется силовым многоугольником?
а) Графическое построение из действующих сил по их величине и направлению
б) Параллелограмм сил
в) Геометрическое сложение системы сходящихся сил
г) Векторная форма сложения сил
д) Определение равнодействующей системы сходящихся сил
__________________________________________________________________
6. Условия равновесия системы сходящихся сил (графические):
а) Известны величины и направление сил системы
б) Силы образуют замкнутый многоугольник
в) Силы не параллельны
г) Силы лежат в одной плоскости
д) Две силы равны по величине и противоположны по направлению.
__________________________________________________________________
7. Аналитический способ определения суммы сходящихся сил:
а)
![]()
б)
![]() ,
,
![]() ,
,
![]()
в) Разложение сил системы на составляющие в собственной системе координат
г) Применяя теорему синусов
д)
Направление силы
![]()
__________________________________________________________________
8. Аналитические условия равновесия системы сходящихся сил:
а)
![]()
б)
![]()
в)
![]() ,
,
![]()
г) Если число неизвестных усилий больше трёх
д) Если силы системы направлены по одной прямой.
__________________________________________________________________
9. Статика изучает:
а) Законы преобразования системы сил в эквивалентные, по действию других систем
б) Движение тела, находящегося под действием сил
в) Действие сил на механические системы
г) Условия равновесия тел, находящихся под действием сил, и законы преобразования одной системы сил в эквивалентные им, по действию других систем
д) Взаимодействие тел, находящихся под действием сил
10. Выбрать момент силы относительно точки:
а)
![]()
б)
![]()
в)
г)
![]()
д)
__________________________________________________________________
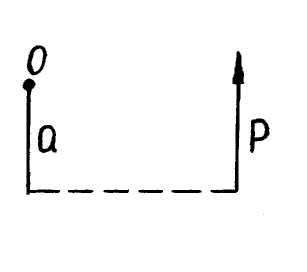
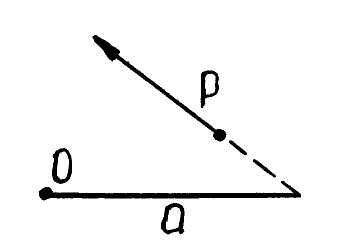
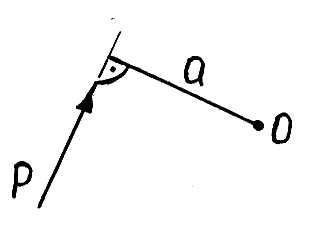
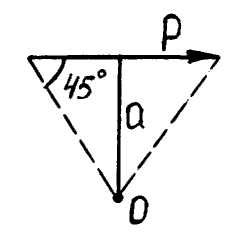
11. Когда момент силы Р относительно точки О равен нулю?
а) Если линия действия силы Р проходит через точку О
б) Если линия действия силы Р параллельна линии, проходящей через точку О
в) Если линия действия силы Р перпендикулярна линии, проходящей через точку О
г) Когда плечо силы Р равно по модулю величине силы Р
д) Когда Р = 0.
__________________________________________________________________
12. Что называют парой сил?
а) Сумма проекций системы сил на какую – либо координатную ось равна нулю
б) Система двух параллельных сил
в) Система двух антипараллельных сил, равных по величине
г) Система двух сил, равных по величине, направленных в разные стороны
д) Система двух параллельных сил, равных по величине и направленных в противоположные стороны
__________________________________________________________________
13. Чему равна равнодействующая пары сил?
а) Нулю
б) Пара сил не имеет равнодействующей
в) Произведению одной из сил пары на расстояние между ними
г) Моменту силы относительно точки, лежащей на линии действия одной из сил пары
д) Моменту пары с теми же параметрами, но лежащей в другой плоскости.
__________________________________________________________________
14. Чем определяется действие пары сил на тело?
а) Положением пары сил на плоскости
б) Равнодействующей пары сил
в) Величиной момента пары и направлением его вращения
г) Моментом силы относительно точки на той же плоскости
д) Система сил пары не находится в равновесии.
__________________________________________________________________
15. Условие равновесия пар сил:
а) Определение равнодействующей пары, заменяющей несколько пар сил
б) Для равновесия системы пар, лежащих в одной плоскости алгебраическая сумма их моментов равняется нулю;
в) Силы пары лежат на одной прямой
г) Плечо равнодействующей пары сил равно нулю
д) Равнодействующая всех сил, составляющих пары сил, равна нулю
__________________________________________________________________
16. Если силу перенести в любую точку твёрдого тела, то …?
а) Возникает момент пары равный моменту заданной силы относительно новой точки
б) Равновесие тела не изменится
в) В новой точке необходимо приложить силу, равную по величине заданной и противоположно направленную
г) Равновесие тела нарушается
д) Возникает система сходящихся сил.
___________________________________________________________
17. Что называется главным вектором системы?
а) Равнодействующая системы сходящихся сил
б) Равнодействующая системы параллельных сил
в) Сила, приложенная в центре антипараллельных сил
г) Геометрическая сумма всех сил системы
![]()
д) Сила, приложенная в центре приведения.
___________________________________________________________
18. Что называется главным моментом системы сил?
а) Пара сил, равная моменту относительно центра приведения сил системы
б) Алгебраическая сумма моментов сил системы относительно точки, называемой центром приведения
в) Момент равнодействующей плоской системы сил относительно произвольной точки системы
г) Момент плоской системы сил относительно точки, лежащей на линии действия равнодействующей этой системы сил
д) Сумма моментов присоединенных пар сил.
___________________________________________________________
19. Аналитические условия равновесия плоской системы сил:
а) Главный вектор системы равен нулю
б) Главный момент системы равен нулю
в)
![]() ;
;
![]()
г) Главный вектор системы и главный момент относительно произвольно выбранного центра равны нулю
д) Сумма проекций всех сил системы на произвольно выбранную координатную ось равна нулю.
__________________________________________________________________
20. Основная система уравнений статики:
а)
![]()
![]()
![]()
![]()
б)
![]()
![]()
в)
![]()
![]()
г)
![]()
д)
![]()
____________________________________________________________________
21.
Когда справедливо условие
![]()
![]()
![]() ?
?
а) Все три моментные точки А; В; С лежат на одной прямой
б) Все три моментные точки А; В; С не лежат на одной прямой
в) Для системы параллельных сил
г) Для системы сил, лежащих на одной прямой
д) Для системы сходящихся сил
___________________________________________________________________
22. Сколько неизвестных величин должно входить в уравнение равновесия сил, расположенных в одной плоскости, для того, чтобы задача была статически определима:
а) Не более числа связей
б) Не более восьми
в) Не более трёх
г) Не более шести
д) Не более пяти.
23.
Консольная балка нагружена парами сил
с моментами М![]() =
200Нм,
=
200Нм,
М2=300 Нм. Определить момент в заделке:
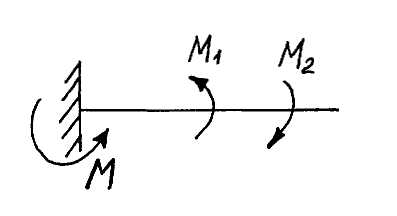
а) М=150 Нм
б) М=100 Нм
в) М=–100 Нм
г) М=400 Нм
д) –200 Нм
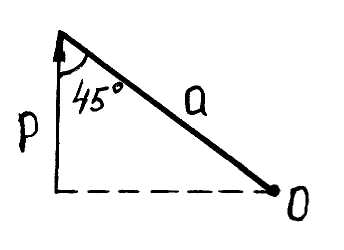
24. На брус ВС, закреплённый в шарнире А, действуют вертикальные силы
F1=4 кН и F2. Определить силу F2, необходимую для того, чтобы брус в положении равновесии был горизонтален, если АС=2 м, АВ=6 м:
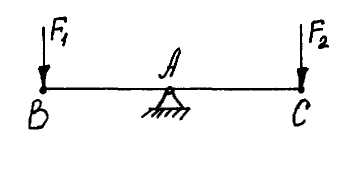
а) F2= 4 кН
б) F2= 8 кН
в) F 2=12 кН
г) F 2=6 кН
д) F 2= 10 кН.
25. Силы, ограничивающие перемещения данного тела называют:
а) Реакциями связи
б) Моментом
в) Связями
г) Опорой
д) Распределённой нагрузкой.
Тема:2. Основные понятия кинематики
26. Кинематика изучает:
а) Законы движения материальных тел, находящихся под действием сил
б) Геометрическую картину движения тел без учёта причин,
вызывающие эти движения
в) Условия равновесия материальных тел
г) Причины, вызывающие движения механической системы
д) Законы преобразования системы сил в эквивалентные по действию другой системы.
________________________________________________________________
27. Что называется траекторией точки?
а) Закон движения точки
б) Прямая линия, по которой движется точка
в) Непрерывная линия, которую описывает движущаяся точка относительно заданной системы координат
г) Положение точки в заданной системе координат
д) Вектор, указывающий направление движения точки
__________________________________________________________________
28. Выбрать естественный способ задания движения точки?
а)
![]()
![]()
б)
![]()
в)
![]()
г)
![]()
д)
![]() ;
;
![]()
__________________________________________________________________
29. Выбрать координатный способ задания движения точки?
а)
![]() ;
;
![]()
б)
![]()
в)
г)
![]()
д)
__________________________________________________________________
30. Выбрать векторный способ задания движения точки?
а)
![]() ;
;
![]()
б)
в)
г)
д)
![]() ;
;
![]()
__________________________________________________________________
31. Дифференциальная зависимость между траекторией точки и скоростью?
а)
![]() ;
;
![]() ;
;
![]()
б)
![]() ;
;
![]() ;
;
![]()
в)
соs
(x;
![]() )
=
)
=
![]() ; cos
(y;
)
=
; cos
(y;
)
=
![]() ; сos
(z;
)
=
; сos
(z;
)
=
![]()
г)
![]()
д)
![]()
__________________________________________________________________
32. Как определить модуль касательного ускорения точки?
а)
![]() ;
;
![]()
б)
![]()
в)
![]()
г)
![]()
д)
![]()
__________________________________________________________________
33. Чему равен радиус кривизны кривой:
а)![]()
б)
![]()
в)![]()
г)
![]()
д)
![]()
34. Как определить модуль нормального ускорения точки?
а)
![]()
б)
в)
г)
![]()
д)
![]()
__________________________________________________________________35. Выбрать скорость и ускорение равномерного прямолинейного движения?
а)
![]() ;
;
![]() ;
;
![]()
б)
![]() ;
;
;
;![]()
в)
;
![]() ;
;
г) ; ; ;
д)
![]() ;
;
;
;
__________________________________________________________________
36. Чем характеризуется поступательное движение?
а) Любая прямая, проведенная в теле, остается параллельной своему первоначальному положению
б) Прямолинейным движением каждой точки тела
в) Любая прямая, проведенная в теле, не меняет своего положения
г)
Положением точки
![]()
д) Вектор ρ, характеризующий расстояние между двумя точками тела, не меняет модуля и направления
__________________________________________________________________
37. Как характеризуются скорости точек тела при поступательном движении?
а) Уравнением
б)
Уравнением
![]()
в) Скорости всех точек тела в каждый момент времени равны между собой
г)
![]()
д)
Перемещения всех точек тела прямолинейны:
![]()
__________________________________________________________________
38. Как характеризуются ускорения точек тела при поступательном движении?
а) Ускорения всех точек тела в каждый момент времени равны между
собой
б)
![]() или
или
![]()
в) Нет необходимости определять ускорение движения тела, достаточно
знать ускорение одной точки
г) Траекторией движения
д) Координаты точки должны быть заданы как функции времени.
__________________________________________________________________
39. Что называется абсолютной скоростью точки?
а) Скорость точки относительно подвижной системы координат
б) Скорость точки относительно неподвижной системы координат
в) Скорость точки при поступательном движении тела
г) Скорость точки в сложном движении в произвольной системе координат
д)
![]() ,
где r
– радиус – вектор, определяющий положение
точки
,
где r
– радиус – вектор, определяющий положение
точки
__________________________________________________________________
40. Что называется переносной скоростью точки?
а)
Скорость движения точки по радиусу
вектора
![]()
б) Скорость движения той точки в подвижной системе координат, с которой совпадает точка, движущаяся в основной системе
в) Скорость движения точки, лежащей на оси вращения тела
г) Угловая скорость подвижной системы координат
д)
![]() ,
где ρ – радиус – вектор точки в подвижной
системе координат
,
где ρ – радиус – вектор точки в подвижной
системе координат
__________________________________________________________________
41. Что называется относительной скоростью точки?
а) Скорость точки в основной системе координат
б)
Скорость определяемая соотношением
![]()
в) Скорость точки по отношению к подвижной системе координат
г) Скорость начала подвижной системы координат по отношению к неподвижной
д) Геометрическая сумма абсолютной и переносной скоростей
__________________________________________________________________
42. Как формируется теорема о сложении скоростей при поступательном
движении точки?
а) Скорость точки в сложном движении равна сумме переносной и относительной скоростей
б) Скорость точки в подвижной системе координат равна
![]()
в) Движение тела или движение какой – либо одной системы координат
относительно другой ничем не ограничено
г) Основными кинематическими характеристиками сложного движения
является угловая скорость и угловое ускорение
д) Модуль угловой скорости определяется равенством:
![]()
__________________________________________________________________
43. Чем характеризуется вращательное движение точки?
а) Положением в осях координат x; y; z
б) В любой момент времени известно положение точки С, лежащей на оси вращения
в) Известна величина угла φ между неподвижной и подвижной системами координат
г) Движущееся тело имеет ось вращения, все точки которой остаются неподвижными
д)
Известно положение радиуса – вектора
![]()
__________________________________________________________________
44. Что называется угловой скоростью тела?
а)
Изменение угла поворота φ = φ (t)
![]()
б)
Зависимость
![]()
в) Отношение угла поворота Δφ к промежутку времени Δt
г)
![]()
д)
![]()
__________________________________________________________________
45. Что называется угловым ускорением?
а)
![]()
б)
![]()
в) приращение угловой скорости Δω за промежуток времени Δt
г)
![]() ,
,
где
![]() - вращательное ускорение точки,
принадлежащей звену ВА
- вращательное ускорение точки,
принадлежащей звену ВА
д)
![]() ,
,
где
![]() - единичный вектор оси ОZ
- единичный вектор оси ОZ
__________________________________________________________________
46. Что называется абсолютным движением точки?
а) Движение точки по отношению к двум системам координат: подвижной и неподвижной
б) Движение точки в подвижной системе координат
в) Движение точки по поверхностям сфер, общий центр которых неподвижен
г) Движение точки по отношению к системе координат, выбранной за основную
д) Движение начала системы координат по заданному закону
__________________________________________________________________
47.Что называется относительным движением точки?
а) движение точки по отношению к подвижной системе координат
б) движение начала подвижной системы координат по любому заданному закону
в) движение точки в неподвижной системе координат
г) положение точки в системе координат представленное уравнением
![]()
д) движение точки по отношению к двум системам координат (подвижной и неподвижной) одновременно
__________________________________________________________________
48. Что называется переносным движением?
а) движение, заданное функциями времени x1A=x1A(t); y1A=y1A(t); z1A=z1A(t)
б) движение подвижной системы координат относительно неподвижной
в) движение в системе координат, выбранной за основную
г) движение в подвижной системе координат
д) все точки системы перемещаются в плоскостях, параллельных некоторой
неподвижной плоскости
__________________________________________________________________
49. Что называется мгновенным центром скоростей?
а) точка плоской фигуры, скорость которой в данный момент времени равна нулю
б)
точка,
скорость которой определяется формулой
![]()
в) точка пересечения векторов скоростей каких – либо двух точек тела
г) точка, координаты которой определяются уравнениями:
![]() ;
;
![]()
д) центр кривизны траектории точки плоской фигуры
__________________________________________________________________
50. На какие виды движения раскладывается сложное движение точки?
а) переносное и поступательное
б) поступательное и вращательное
в) переносное и относительное
г) переносное и абсолютное
д) плоское и относительное
__________________________________________________________________