

1 Билет Кинематика поступательного движения материальной точки
При поступательном движении тела все точки тела движутся одинаково, и, вместо того чтобы рассматривать движение каждой точки тела, можно рассматривать движение только одной его точки.
Основные характеристики движения материальной точки: траектория движения, перемещение точки, пройденный ею путь, координаты, скорость и ускорение.
Линию, по которой движется материальная точка в пространстве, называют траекторией.
Перемещением материальной точки за некоторый промежуток времени называется вектор перемещения ∆r=r-r0, направленный от положения точки в начальный момент времени к ее положению в конечный момент.
Скорость материальной точки представляет собой вектор, характеризующий направление и быстроту перемещения материальной точки относительно тела отсчета. Вектор ускоренияхарактеризует быстроту и направление изменения скорости материальной точки относительно тела отсчета.
2 Билет Динамика материальной точки. Законы Ньютона
Инертная масса – это мера инертности тела при поступательном движении (m[кг]).
Из опыта известно, что при одинаковых воздействиях различные тела неодинаково изменяют скорость своего движения, иными словами, приобретают различные ускорения. Ускорение зависит не только от величины воздействия, но и от свойств самого тела (от его массы).
Сила
– это векторная
величина, являющаяся мерой механического
воздействия на тело со стороны других
тел или полей, в результате которого
тело приобретает ускорение или изменяет
свою форму и размеры ( [Н]).
[Н]).
Первый закон Ньютона.
Тело сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не выведет его из этого состояния.
Первый закон Ньютона утверждает существование инерциальных систем отсчета.
Второй закон Ньютона.
 - импульс тела.
- импульс тела.
Скорость изменения импульса тела равна действующей на него силе.

Если
масса тела постоянна, то верна формула:

Под
F мы понимаем результирующую всех сил,
действующих на тело. Сумма сил, действующих
на тело, сообщает ему ускорение
 .
.

В частном случае, если сумма сил равна нулю, получаем первый закон Ньютона.
Третий закон Ньютона.
Если тело A действует на тело D с силой F, то тело D действует на тело A с силой равной по величине и обратной по направлению силе F. Силы приложены к разным телам.
3 Билет Кинематика вращательного движения
При описании вращательного движения твердого тела относительно неподвижной в данной системе отсчета принято использовать векторные величины особого рода. В отличие от рассмотренных выше полярных векторов r (радиус-вектор), v (скорость), a (ускорение), направление которых естественным образом вытекает из природы самих величин, направление векторов, характеризующих вращательное движение, совпадает с осью вращения, поэтому их называют аксиальными (лат. axis – ось).
Элементарный поворот dφ – аксиальный вектор, модуль которого равен углу поворота dφ, а направление вдоль оси вращения ОО' (см. рис. 1.4) определяется правилом правого винта.
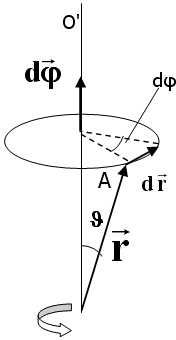 Рис.1.4.
К определению направления аксиального
вектора
Рис.1.4.
К определению направления аксиального
вектора
Линейное перемещение dr произвольной точки А твердого тела связано с радиусом-вектором r и поворотом dφ соотношением dr=rsinα•dφ или в векторном виде через векторное произведение:
dr=[dφ,r] (1.9)
Соотношение (1.9) справедливо именно для бесконечно малого поворота dφ.
Угловая скорость ω – аксиальный вектор, определяемый производной вектора поворота по времени:
ω=dφ/dt=φ'
Вектор ω, как и вектор dφ, направлен вдоль оси вращения по правилу правого винта (рис.1.5).
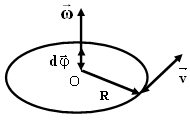 Рис.1.5.
К определению направления вектора
Рис.1.5.
К определению направления вектора
Угловое ускорение β – аксиальный вектор, определяемый производной вектора угловой скорости по времени:
β=dω/dt=d2φ/dt2=ω'=φ''
При ускоренном движении вектор β по направлению совпадает с ω (рис. 1.6,а), а при замедленном - векторы β и ω направлены противоположно друг другу (рис. 1.6,б).
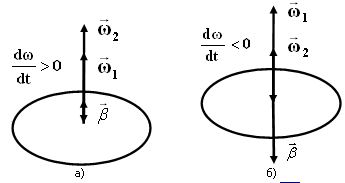 Рис.1.6.
Связь между направлениями векторов ω
и β
Рис.1.6.
Связь между направлениями векторов ω
и β
Важное замечание: решение всех задач на вращение твердого тела вокруг неподвижной оси по форме аналогично задачам на прямолинейное движение точки. Достаточно заменить линейные величины x, vx, ax на соответствующие им угловые φ, ω и β, и мы получим уравнения, аналогичные (1.6) -(1.8).
4 билет. Основной закон динамики вращательного движения:
Основной закон динамики вращательного движения можно получить из второго закона Ньютона для поступательного движения твердого тела
![]() ,
(1.6)
,
(1.6)
где F – сила, приложенная к телу массой m; а – линейное ускорение тела.
Если
к твердому телу массой m в
точке А (рис. 5) приложить силу F,
то в результате жесткой связи между
всеми материальными точками тела все
они получат угловое ускорение ![]() и
соответственные линейные ускорения,
как если бы на каждую точку действовала
сила
и
соответственные линейные ускорения,
как если бы на каждую точку действовала
сила ![]() .
Для каждой материальной точки можно
записать:
.
Для каждой материальной точки можно
записать:
![]() ,
,
где ![]() , поэтому
, поэтому
![]() ,
(1.7)
,
(1.7)
где mi – масса i-й точки; – угловое ускорение; ri – ее расстояние до оси вращения.
Умножая левую и правую части уравнения (1.7) на ri, получают
![]() ,
(1.8)
,
(1.8)
где ![]() –
момент силы – это произведение силы
–
момент силы – это произведение силы ![]() на
ее плечо
на
ее плечо ![]() .
.
Плечом
силы называют кратчайшее расстояние
от оси вращения “ОО” (рис. 5) до линии
действия силы ![]() .
.
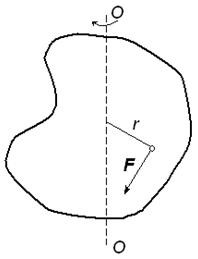
Рис. 5. Твердое тело, вращающееся под
действием силы F около оси “ОО”
![]() –
момент инерции i-й
материальной точки.
–
момент инерции i-й
материальной точки.
Выражение (1.8) можно записать так:
![]() .
(1.9)
.
(1.9)
Просуммируем левую и правую части (1.9) по всем точкам тела:
 .
.
Обозначим  через М,
а
через М,
а ![]() через J,
тогда
через J,
тогда
![]() (1.10)
(1.10)
Уравнение
(1.10) – основной закон динамики вращательного
движения твердого тела. Величина –
геометрическая сумма всех моментов
сил, то есть момент силы F,
сообщающий всем точкам тела ускорение
–
геометрическая сумма всех моментов
сил, то есть момент силы F,
сообщающий всем точкам тела ускорение ![]() .
. –
алгебраическая сумма моментов инерции
всех точек тела. Закон формулируется
так: «Момент силы, действующий на
вращающееся тело, равен произведению
момента инерции тела на угловое
ускорение».
–
алгебраическая сумма моментов инерции
всех точек тела. Закон формулируется
так: «Момент силы, действующий на
вращающееся тело, равен произведению
момента инерции тела на угловое
ускорение».
Мгновенное
значение углового ускорения ![]() ,
есть первая производная угловой
скорости
,
есть первая производная угловой
скорости ![]() по
времени
по
времени ![]() ,
то есть
,
то есть
 ,
(1.11)
,
(1.11)
где ![]() –
элементарное изменение угловой скорости
тела за элементарный промежуток
времени
–
элементарное изменение угловой скорости
тела за элементарный промежуток
времени ![]() .
.
Если в выражение основного закона (1.10) поставить значение мгновенного ускорения (1.11), то
 или
или ![]() ,
(1.12)
,
(1.12)
где ![]() –
импульс момента силы – это произведение
момента силы
–
импульс момента силы – это произведение
момента силы ![]() на
промежуток времени
.
на
промежуток времени
.
![]() –
изменение момента
импульса тела,
–
изменение момента
импульса тела, ![]() –
момент импульса тела есть произведение
момента инерции J на
угловую скорость
–
момент импульса тела есть произведение
момента инерции J на
угловую скорость ![]() ,
а
,
а ![]() есть
есть ![]() .
.
Поэтому
основной закон динамики вращательного
движения твердого тела формулируется
так: “Импульс момента силы ![]() ,
действующий на вращательное тело, равен
изменению его момента импульса
,
действующий на вращательное тело, равен
изменению его момента импульса ![]() ”:
”:
![]() или
или ![]()