

2.3 Следящие системы
В
таких системах функция ![]() заранее
неизвестна. В таких системах выходная
величина должна следить за изменением
входной величины. Широко распространены
приборные следящие системы (положение
стрелки должно отслеживать изменение
температуры или давления в объекте).
заранее
неизвестна. В таких системах выходная
величина должна следить за изменением
входной величины. Широко распространены
приборные следящие системы (положение
стрелки должно отслеживать изменение
температуры или давления в объекте).
Тема 3. Основные законы управления
Законы управления – это соотношение, которое реализует идеальное управляющее устройство – идеализированный алгоритм управления.
Алгоритм работы реального управляющего устройства отличается от идеализированного алгоритма из-за динамического искажения. Динамическое искажение обусловлено инерционностью УУ, т.е. несовершенством его изготовления.
Инерционность УУ намного меньше инерционности ОУ, поэтому фактический алгоритм работы УУ мало отличается от идеального, т.е. от законов управления.
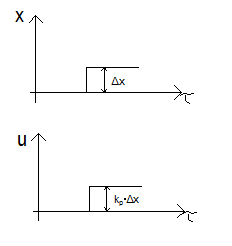
Пропорциональный закон регулирования (п – регулирование)
Наибольшее
быстродействие обеспечивает П-закон управления
![]() ,
,
где - настройка П – регулятора. Качество регулирования зависит от качества выбора этой настройки.
Если
коэффициент усиления П-регулятора ![]() мал (чаще всего это наблюдается в системах
с запаздыванием), то такой регулятор не
обеспечивает высокой точности
регулирования, т.к. в этом случае велика
величина статической ошибки.
мал (чаще всего это наблюдается в системах
с запаздыванием), то такой регулятор не
обеспечивает высокой точности
регулирования, т.к. в этом случае велика
величина статической ошибки.
Если Кр > 10, то П-регулятор приемлем, а если Если Кр < 10, то требуется введение в закон управления интегральной составляющей.
Характеристики этого закона
И – закон регулирования (интегральное)
И-регулятор
работает по закону![]()
ТИ – постоянное времени интегрирования (настройка И-регулятора). От него зависит качество регулирования.
И-регулятор является астатическимрегулятором, следовательно, установившаяся ошибка будет равна 0.

Управляющее
воздействие перестанет меняться тогда,
когда установившаяся ошибка ![]()
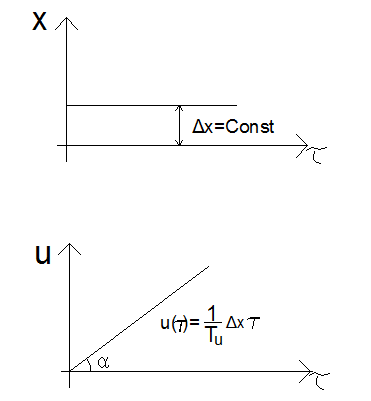
![]()
Если ТИрастет, то качество регулирования меняется (медленнее изменяется управляющее воздействие).
ПИ – закон регулирования (пропорционально-интегральный)

Управляющее
воздействие перестанет меняться тогда,
когда ![]()
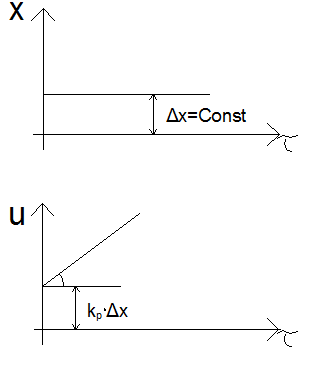
![]()
Пропорциональная часть этого регулятора обеспечивает быстроту реакции на изменение ошибки регулирования, поэтому он лучше И-регулятора.
ПИД – закон регулирования (пропорционально-интегрально-дифференциальный закон регулирования)

Из-за наличия дифференциальной части данный регулятор является наиболее быстродействующим, чем ПИ –регулятор.
Управление паровыми котлами
![]()
![]()
![]() – помехи
имеют высокую частоту
– помехи
имеют высокую частоту
![]()
Дифференциальные части ПИД – регулятора усиливают влияние помех, поэтому такие регуляторы используют достаточно редко. (т.к. усиливает помехи в -раз)
Двухпозиционный закон регулирования
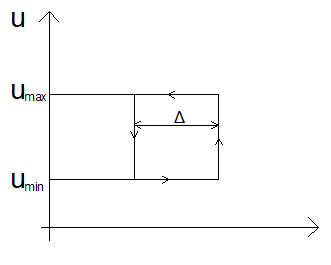
![]()
![]() -
соответственно максимальное, минимальное
значение управляющего воздействия
-
соответственно максимальное, минимальное
значение управляющего воздействия
![]() – номер
момента времени, для которого вычисляется
управляющее воздействие
– номер
момента времени, для которого вычисляется
управляющее воздействие
![]() -
ширина петли гистерезиса – настройка
регулятора, с помощью которой можно
менять качество регулирования.
-
ширина петли гистерезиса – настройка
регулятора, с помощью которой можно
менять качество регулирования.