

1.4 Комбинированный принцип управления
Комбинированный принцип управления - когда одновременно используются принцип обратной связи и принцип управления по основным возмущениям.
![]()
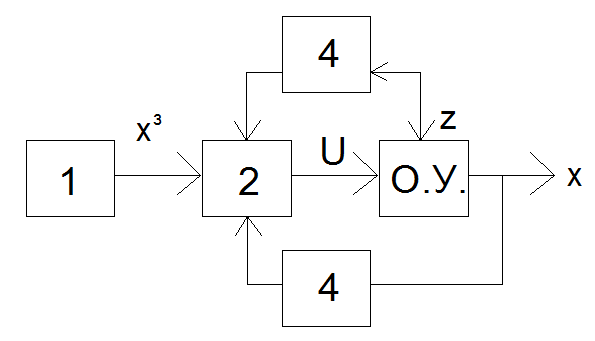
Рис. 8
задатчик
УУ
устройство для измерения основных возмущений
устройство для измерения выходных координат объекта
Управляющее воздействие формируется и в функции основных воздействий и в функции фактических значений выходных координат объекта.
Канал компенсации основных возмущений обеспечивает быстроту реакции УУ на эти основные возмущения.
Канал обратной связи обеспечивает быстроту реакции УУ на другие неконтролируемые возмущения, а также снижает влияние погрешностей реализации канала компенсации.
Тема 2 Основные виды алгоритма функционирования
2.1 Стабилизация
![]() – система,
обеспечивающая const
значение выходных величин объекта,
называется системами
стабилизации
– система,
обеспечивающая const
значение выходных величин объекта,
называется системами
стабилизации
Недостаток таких систем:
Если в таких системах используется статический регулятор
(
u=![]() где
где
![]() - коэффициент передачи регулятора,
- коэффициент передачи регулятора, ![]() ),
то неизбежна установившаяся ошибка
регулирования.
),
то неизбежна установившаяся ошибка
регулирования.
![]()
- описываются статические свойства объекта
![]() - коэффициенты
- коэффициенты
![]()
![]()
![]()

Фактическое значение xпри одном и том же значении задания xз зависит от величины воздействия z(нагрузки).
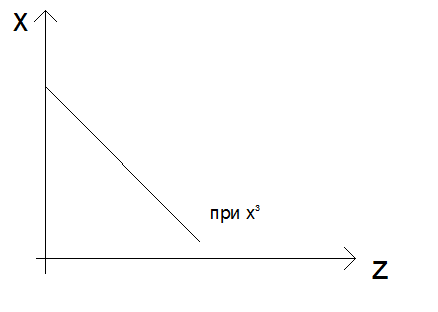
Чем больше z, тем меньше x,при одном и том же xз .
Регулирование, при котором установившееся значение выходной величины объекта при одном и том же задании xз зависит от величины нагрузки z, называется статическим регулированием.

В
данном случае если z=0,
то ![]() установившаяся
ошибка регулирования. В статических
системах всегда есть ошибка регулирования.
установившаяся
ошибка регулирования. В статических
системах всегда есть ошибка регулирования.
При наличии автоматического регулятора ошибка регулирования, обусловленная возмущением z, равна

Если бы регулятора не было, то отклонение x, вызванное возмущением z, было бы равно
![]()
Поскольку![]() ,
следовательно, регулятор уменьшает
отклонение выходной величины объекта,
обусловленного возмущением z,
но не устраняет это отклонение полностью,
т.к.
,
следовательно, регулятор уменьшает
отклонение выходной величины объекта,
обусловленного возмущением z,
но не устраняет это отклонение полностью,
т.к. ![]() .
.
В некоторых случаях статическая ошибка недопустима, тогда переходят к астатическому регулированию, при котором регулируемая величина в установившемся режиме принимает точно требуемое значение независимо от величины возмущающего фактора.
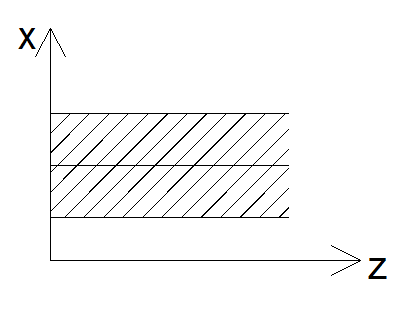
Прямая – характеристика астатического регулирования, т.е. Xне зависит от Z.
Xможет находится в любой точке заштрихованной зоны.Это обуславливается погрешностями конструирования управляющих устройств, но никак не связанно с величиной нагрузкиZ.
Пример астатического регулятора:
![]() –регулятор
астатической системы регулирования
–регулятор
астатической системы регулирования
![]() ,
=>, если
∆x=0,
то управляющее воздействие будет
изменяться до этих пор (∆x=0).
,
=>, если
∆x=0,
то управляющее воздействие будет
изменяться до этих пор (∆x=0).
Достоинства и недостатки статического и астатическогорегулирования:
— статические регуляторы обладают статической ошибкой;
— астатические регуляторы статической ошибки не имеют, но они более инерционны, сложны конструктивно и более дороги.
2.2 Программное регулирование
Различают системы с временной и пространственной программами.
![]() – функция времени.
– функция времени.
Системыс временной программой применяются для управления температурой в печах накаливания, т.к. температура в печи должна меняться во времени в процессе термообработки.
Системы программного управления могут применяться для регулирования температуры воздуха в помещении в ночное время. Известно, что в жилых зданиях некоторое понижение температуры воздуха положительно сказывается на самочувствии людей. В общественных зданиях внутреннюю температуру выгодно снижать в ночное время примерно до 12 ◦С.
Системы с пространственной программой используются для управления металлообрабатывающими станками. В этом случае x является функцией пространственных координат.
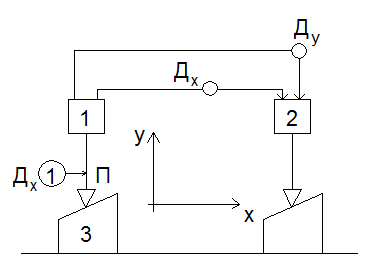
– УУ (управляющее устройство)
2 – ОУ (объект управления – металлообрабатывающий станок)
3 – шаблон (задатчик) – задает программу пространственной обработки (заготовки)
П – копировальный палец
Дх – двигатели, которые перемещают и копировальный палец П и рабочий инструмент по координате x
Ду - двигатели, которые перемещают рабочий инструмент по координате y
Электропривод отрабатывает пространственные программы.
Сигнал поступает наДх и Ду