

Введение
Общие сведения о рассматриваемых объектах управления
Ракета космического назначения состоит из трех частей — в ее состав входят ракета-носитель, разгонный блок и космический аппарат. Ракета должна вывести космический аппарат на заданную орбиту. Космический аппарат — общее название технических устройств, используемых для выполнения разнообразных задач в космическом пространстве, а также проведения исследовательских и иных работ на поверхности различных небесных тел.
Важнейшей частью ракеты космического назначения является разгонный блок, называемый также межорбитальным буксиром. Разгонные блоки обеспечивают перемещение полезного груза (космического аппарата) с одной орбиты на другую или направление его на отлетные и межпланетные траектории.
Разгонный блок — это ракета, имеющая ракетный двигатель. Однако она не может стартовать с Земли. Поэтому она стартует «на плечах» у ракеты-носителя, играя роль еще одной (дополнительной) ступени. Ракетный двигатель разгонного блока включается только тогда, когда носитель выполнит свою задачу и доставит разгонный блок в нужную точку космической траектории.
Разгонный блок должен выполнить один или несколько маневров, связанных с изменением скорости полета. Для этого в каждом случае предполагается включение маршевого двигателя. Между этими включениями следуют продолжительные (до нескольких часов) участки пассивного полета по переходным орбитам или траекториям.
Разгонник должен иметь маршевый двигатель многократного включения, а также дополнительную двигательную установку, например, двигатели малой тяги, обеспечивающие ориентацию и стабилизацию движения и создание условий для запуска маршевого двигателя.
Для управления работой двигателей разгонного блока и решения иных задач необходима система управления. В разгонном блоке должен быть специальный приборный отсек для ее размещения.
Примеры современных РБ.
Универсальный космический буксир (разгонный блок) «Фрегат»

РБ “Фрегат”
Полезные нагрузки (различные КА)
Полезные нагрузки (различные КА)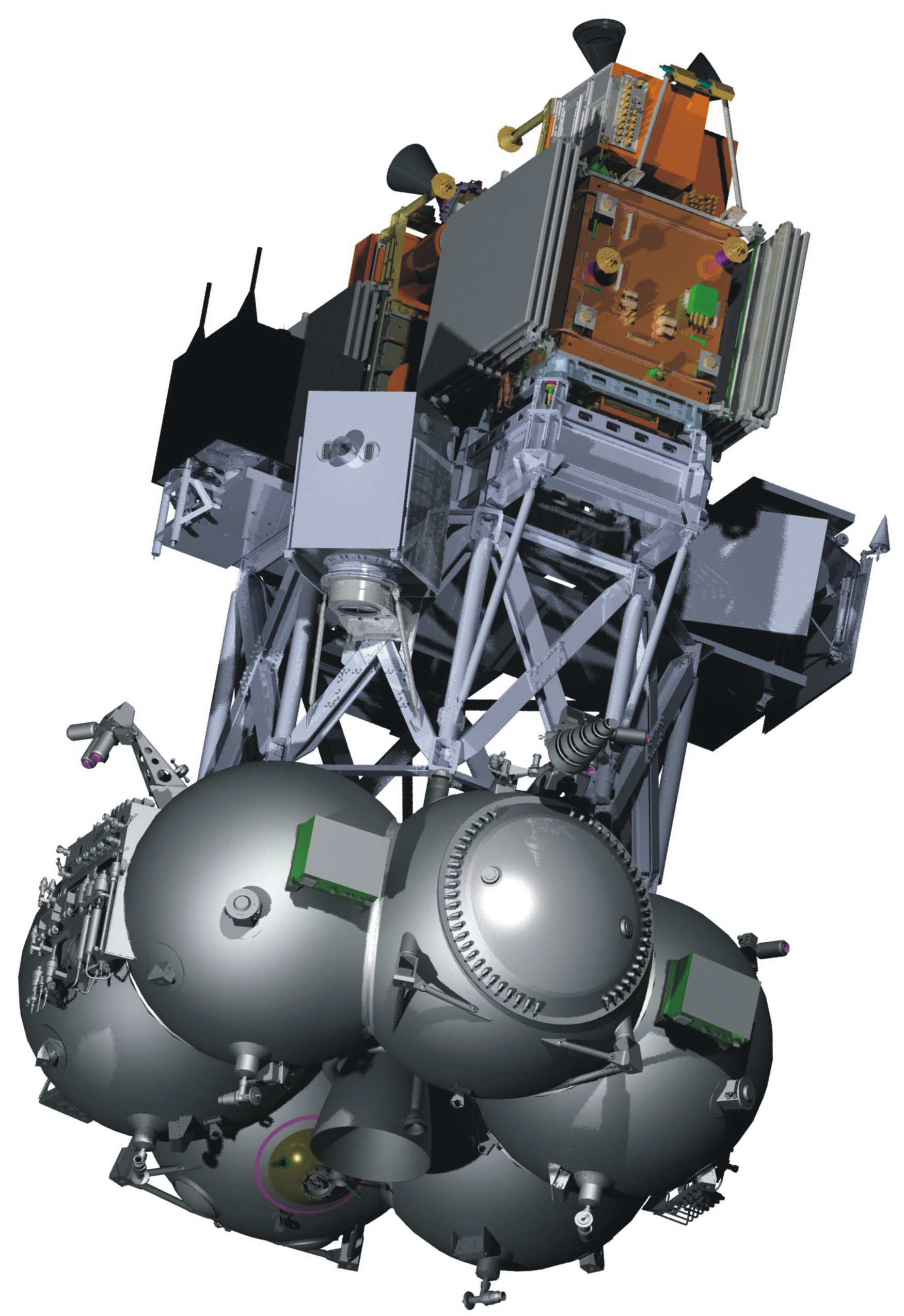






Рис. В.1. Общий вид головной части с РБ “Бриз М”
На рис. В.1 показан общий вид космической головной части (КГЧ), в состав которой входят: космический аппарат (КА), разгонный блок (РБ), переходная система, головной обтекатель (ГО).
КА стыкуется с РБ через переходную систему. Разгонный блок имеет в своем составе маршевый двигатель и двигатели малой тяги. Маршевый двигатель (МД) разгонного блока установлен в кардановом подвесе и отклоняется двумя электрогидравлическими сервоприводами в двух плоскостях стабилизации, что обеспечивает управление движением на активных участках полета (участки включения МД).
Двигатели малой тяги предназначены для обеспечения запуска МД, «поджатия» топлива к нижним днищам баков перед каждым включением МД и корректировки импульсов стабилизации и ориентации на пассивных участках полета.
Система управления (СУ) РБ является автономной, инерциальной, она построена на базе трехосной гиростабилизированной платформы и бортового цифрового вычислительного комплекса.
Смежными для системы управления РБ являются:
– двигательная установка (ДУ);
– система обеспечения тепловых режимов (СОТР);
– пироустройства для коммутации гидромагистралей и космического аппарата (КА);
– бортовой измерительный комплекс (БИК);
– система управления ракетой-носителем (СУ РН);
– бортовая система управления космическим аппаратом (БСУКА).
Бортовой измерительный комплекс (БИК) включает аппаратуру системы телеметрических измерений, в том числе два передатчика, обеспечивающих передачу телеметрической информации на наземные измерительные пункты (НИП), аппаратуру для передачи телеме-
трической информации через спутники-трансляторы на невидимых участках траектории, а также аппаратуру для определения внешнетраекторных параметров РБ (навигационную аппаратуру потребителя (НАП) и аппаратуру для радиоконтроля орбиты).
СОТР и БИК функционируют от начала предстартовой подготовки при наземном контроле и до окончания полета РБ.
При полете по переходной орбите осуществляются сеансы связи с Землей для радиоконтроля орбиты.
Отделение КА осуществляется либо непосредственно после последнего выключения МД (в ориентации, полученной на момент выключения МД), либо после выполнения специальных маневров, обеспечивающих приведение РБ в заданную ориентацию, а также закрутку КА (по требованию Заказчика).
Сбор телеметрической информации проводится в течение всего полета РБ. Передача телеметрической информации на наземный пункт осуществляется на отдельных участках полета с учетом наличия необходимых условий для обеспечения приема-передачи.
После отделения КА на участке автономного полета по целевой орбите разгонного блока проводятся сеансы радиоконтроля целевой орбиты, увод РБ, радиоконтроль орбиты увода и заключительные операции по приведению разгонного блока в безопасное состояние (сброс давления из баков, баллонов и магистралей РБ).
Система управления является центральной частью РБ, помимо управления движением она обеспечивает коммутацию питания всех бортовых потребителей, управление в реальном масштабе времени всеми исполнительными устройствами и получает сигналы от датчи-
ков на всех участках полета, в том числе на участке полета ракеты-носителя.