

Датчики крутящего момента. Тензометрический, магнитоупругий дкм. Датчики момента на основе эффекта Холла.
Датчики крутящего момента (ДКМ) используются для преобразования моментов, действующих на рабочих валах машин, в электрические сигналы.
По типу чувствительного элемента ДКМ могут быть тензометрическими, магнитоупругими и датчиками Холла. Чувствительным элементом тензометрических датчиков момента является упругий (торсионный) вал, который вводится в разрыв силовой цепи рабочего вала (рис. 2.44). Упругий вал под действием приложенного к нему момента закручивается. Возникающие при этом деформации воспринимаются тензорезисторами моста ТМ, приклеенными к измерительному валу под углом 45 к его продольной оси. Напряжение питания к мосту и измерительный сигнал с него передаются через контактные кольца и щетки. На выходе усилителя формируется сигнал, пропорциональный крутящему моменту Uвых = kМ, где k – коэффициент преобразования датчика. Сужение торсионного вала способствует измерению малых крутящих моментов с высокой точностью, так как при этом достигаются достаточные деформации (повышается чувствительность датчика).Если в силовую кинематическую цепь нельзя ввести торсионный вал, то тензорезисторы наклеивают прямо на рабочий вал и используют бесконтактную передачу сигналов, применяя индуктивную связь для передачи питания и емкостную связь для съема сигнала измерения. Такой датчик является сложным и не обеспечивает высокой точности измерения.
Магнитоупругие ДКМ являются бесконтактными, их применение особенно эффективно для непрерывного контроля моментов, так как они практически работают без износа и без обслуживания по сравнению с тензометрическими ДКМ с контактной передачей сигналов.
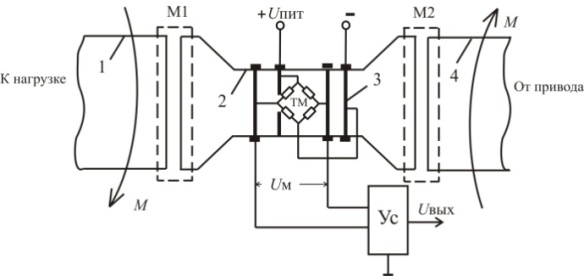 Тензометрический
ДКМ с контактной передачей сигналов:
1, 4 – ведомый и ведущий рабочие валы; 2
– торсионный вал (упругий элемент); 3 –
контактное кольцо со щеткой; М1, М2 –
соединительные муфты; ТМ – тензометрический
мост; М – крутящий момент. В магнитоупругих
ДКМ используется свойство ферромагнитных
материалов изменять свою магнитную
проницаемость в направлении воздействия
на них сил растяжения или сжатия
(магнитоупругий эффект). В магнитоупругом
ДКМ вокруг вращающегося рабочего
стального вала расположены кольцевые
полюса магнитных систем, снабженных
обмотками. Ток обмотки возбуждения
создает на поверхности вала переменное
магнитное поле, которое при ненагруженном
вале располагается симметрично между
полюсами N
и S,
и выходное напряжение датчика равно
нулю.
Тензометрический
ДКМ с контактной передачей сигналов:
1, 4 – ведомый и ведущий рабочие валы; 2
– торсионный вал (упругий элемент); 3 –
контактное кольцо со щеткой; М1, М2 –
соединительные муфты; ТМ – тензометрический
мост; М – крутящий момент. В магнитоупругих
ДКМ используется свойство ферромагнитных
материалов изменять свою магнитную
проницаемость в направлении воздействия
на них сил растяжения или сжатия
(магнитоупругий эффект). В магнитоупругом
ДКМ вокруг вращающегося рабочего
стального вала расположены кольцевые
полюса магнитных систем, снабженных
обмотками. Ток обмотки возбуждения
создает на поверхности вала переменное
магнитное поле, которое при ненагруженном
вале располагается симметрично между
полюсами N
и S,
и выходное напряжение датчика равно
нулю.
 Магнитоупругий
преобразователь момента: Wв
– обмотка возбуждения (первичная
обмотка); W1,
W2
– измерительные обмотки (вторичные
обмотки)
Магнитоупругий
преобразователь момента: Wв
– обмотка возбуждения (первичная
обмотка); W1,
W2
– измерительные обмотки (вторичные
обмотки)
Датчики момента на основе эффекта Холла в качестве чувствительного элемента содержат полупроводниковую пластину с протекающим по ней током І, размещенную в магнитном поле с индукцией B так, что направление тока в пластине перпендикулярно магнитным силовым линиям. Использование эффекта Холла для измерения крутящего момента электродвигателей основывается на том, что их электромагнитный момент пропорционален произведению магнитного потока и тока. При постоянном магнитном потоке момент электродвигателя можно измерить при помощи датчика тока, выполненного на эффекте Холла.