

Исполнительные устройства. Классификация исполнительных устройств.
Исполнительные устройства (ИУ) являются выходным каскадом в системах автоматики. В системах автоматического управления ИУ обеспечивают непосредственное воздействие на объекты путем изменения потоков энергии или вещества, подводимых к ним. В системах контроля ИУ управляют различными приборами: звуковыми, световыми, регистрирующими и т.п.
Классификация исполнительных устройств по таким признакам, как вид используемой в ИУ энергии, тип исполнительных элементов (силовых преобразователей энергии в перемещение регулирующего или рабочего органа (РО)), вид входного сигнала ИУ (электрический или механический), способ управления движением, представлена на рис. 6.1.
В электродвигательных ИУ в качестве исполнительных элементов используются обычные электродвигатели постоянного или переменного тока мощностью от нескольких десятков Вт до десятков кВт, а также шаговые и линейные двигатели. В электромагнитных ИУ функции преобразователей электроэнергии в механическое движение выполняют электромагниты (электромагнитные клапаны, муфты и др.).
К исполнительным устройствам с электрическими выходными сигналами относятся:
а) пусковая аппаратура (контакторы, реле, пускатели);
б) усилители мощности с фазовым или широтно-импульсным управлением (полупроводниковые, магнитные, электромашинные);
в) трансформаторы регулируемые;
г) реостаты.
Исполнительные устройства с механическим выходным сигналом (перемещением РО) включают в свой состав приводы, называемые сервоприводами или исполнительными механизмами, которые могут быть электрическими, гидравлическими или пневматическими, и муфты (электромагнитные, гидравлические), используемые для управляемого соединения ведущего и ведомого валов, а также при необходимости обеспечения плавного пуска механизмов.
Классификация исполнительных устройств:
По роду энергии: Электрические, Гидравлические, Пневматические, Комбинированные
По типу исполнительного элемента: Электродвигательные, Электромагнитные, Поршневые, Моторные, Мембранные
По виду выходного сигнала: ИУ с электрическим выходом, ИУ с механическим выходом
По способу управления регулирующего органа: Пропорциональные ИУ, Интегрирующие ИУ, Позиционные ИУ.
Обобщенная структурная схема исполнительного устройства с механическим выходным сигналом.
В технической литературе пропорциональные ИУ нередко называют исполнительными механизмами (ИМ) переменной скорости, а интегральные ИУ – исполнительными механизмами постоянной скорости. С ИМ первого типа обычно работают автоматические регуляторы непрерывного действия (аналоговые АР), а с ИМ постоянной скорости – импульсные или позиционные регуляторы.
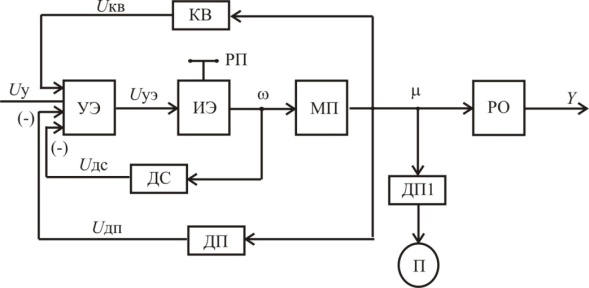
Обобщенная структура исполнительного устройства с механическим выходным сигналом представлена на рис. 6.2. Из этой структуры легко получить более простые как замкнутые, так и разомкнутые системы ИУ.
 Обобщенная
структурная схема исполнительного
устройства с механическим выходным
сигналом
Обобщенная
структурная схема исполнительного
устройства с механическим выходным
сигналом
В общем случае в состав исполнительного устройства могут входить следующие элементы (см. рис. 6.2):
УЭ – управляющий элемент (аналоговый или дискретный усилитель мощности, золотник, позиционер и т.п.), выполняющий функции сумматора сигналов, формирователя и усилителя;
ИЭ – исполнительный элемент, выполняющий функции преобразователя сигнала Uуэ в механическое движение со скоростью ω (электромагниты, электродвигатели, гидро- и пневмоцилиндры и т.д.);
МП – механический преобразователь движения (редуктор, зубчато-реечный механизм, устройство «винт-гайка» и др.), обеспечивающий требуемые параметры движения регулирующего органа или рабочего механизма;
РО – регулирующий орган или рабочий механизм (клапан, задвижка, вентиль и т.п. РО для управления потоками вещества или фреза, суппорт, захват и др. подвижные элементы рабочих машин), осуществляющий управляющее воздействие Y на объект управления;
ДС, ДП – датчики скорости и положения РО, формирующие сигналы отрицательных обратных связей по скорости UДС и положению UДП для обеспечения с высокой точностью перемещения РО, а следовательно, и управляющего воздействия на объект;
КВ – конечные выключатели, формирующие сигналы UКВ отключения ИЭ в крайних положениях РО;
РП – ручной привод (штурвал) исполнительного механизма; ДП1, П – датчик и прибор устройства визуального контроля положения РО.
В системах автоматизации широкое применение нашли достаточно простые ИУ, выполненные по разомкнутой системе (без обратных связей), состоящие из привода (исполнительного механизма ИМ) и регулирующего органа РО. ИМ воспринимает командные сигналы управляющего устройства и вызывает перемещение РО, который непосредственно воздействует на технологический процесс. Такие ИУ могут представлять собой конструктивно единое целое или комплектоваться по месту из отдельно поставляемых ИМ и РО.