

Обобщенная функциональная структура автоматического регулятора. Регуляторы непрерывного действия, основные законы регулирования.
Обобщенная
функциональная структура автоматического
регулятора: МВ – модуль ввода сигналов
от датчиков контролируемых параметров
( );
ЗД – задатчик значения регулируемой
величины (модуль формирования заданий);
Σ – сумматор сигналов задания и
контролируемых величин; МР – модуль
формирования сигнала регулирования;
МВВ – модуль вывода сигналов регулятора.
Современные аналоговые промышленные
регуляторы, например, РБА, Р12 и др.
строятся на базе операционных усилителей
(ОУ), используя модульный принцип
формирования универсального ПИД закона
регулирования. Регулятор собирается
из однофункциональных элементов на ОУ
(сумматоров, интеграторов, дифференциаторов,
демпферов, ограничителей и др.) таким
образом, чтобы обеспечить независимую
настройку параметров ПИД закона
регулирования.
);
ЗД – задатчик значения регулируемой
величины (модуль формирования заданий);
Σ – сумматор сигналов задания и
контролируемых величин; МР – модуль
формирования сигнала регулирования;
МВВ – модуль вывода сигналов регулятора.
Современные аналоговые промышленные
регуляторы, например, РБА, Р12 и др.
строятся на базе операционных усилителей
(ОУ), используя модульный принцип
формирования универсального ПИД закона
регулирования. Регулятор собирается
из однофункциональных элементов на ОУ
(сумматоров, интеграторов, дифференциаторов,
демпферов, ограничителей и др.) таким
образом, чтобы обеспечить независимую
настройку параметров ПИД закона
регулирования.
По типу закона регулирования АР делятся на нелинейные (сигнал регулирования этих АР является нелинейной функцией рассогласования) и линейные. Последние по алгоритму регулирования, реализуемого регулятором, могут быть пропорциональными (П), пропорционально-интегральными (ПИ), пропорционально-интегрально-дифференциальными (ПИД). Для регулирования тока обычно используются ПИ-закон, а П-регулирование применяется при необходимости управления напряжением силового тиристорного преобразователя по замкнутой схеме.
Структурная алгоритмическая схема регулятора типа рба. Привести блок-схему и пояснить принцип работы.
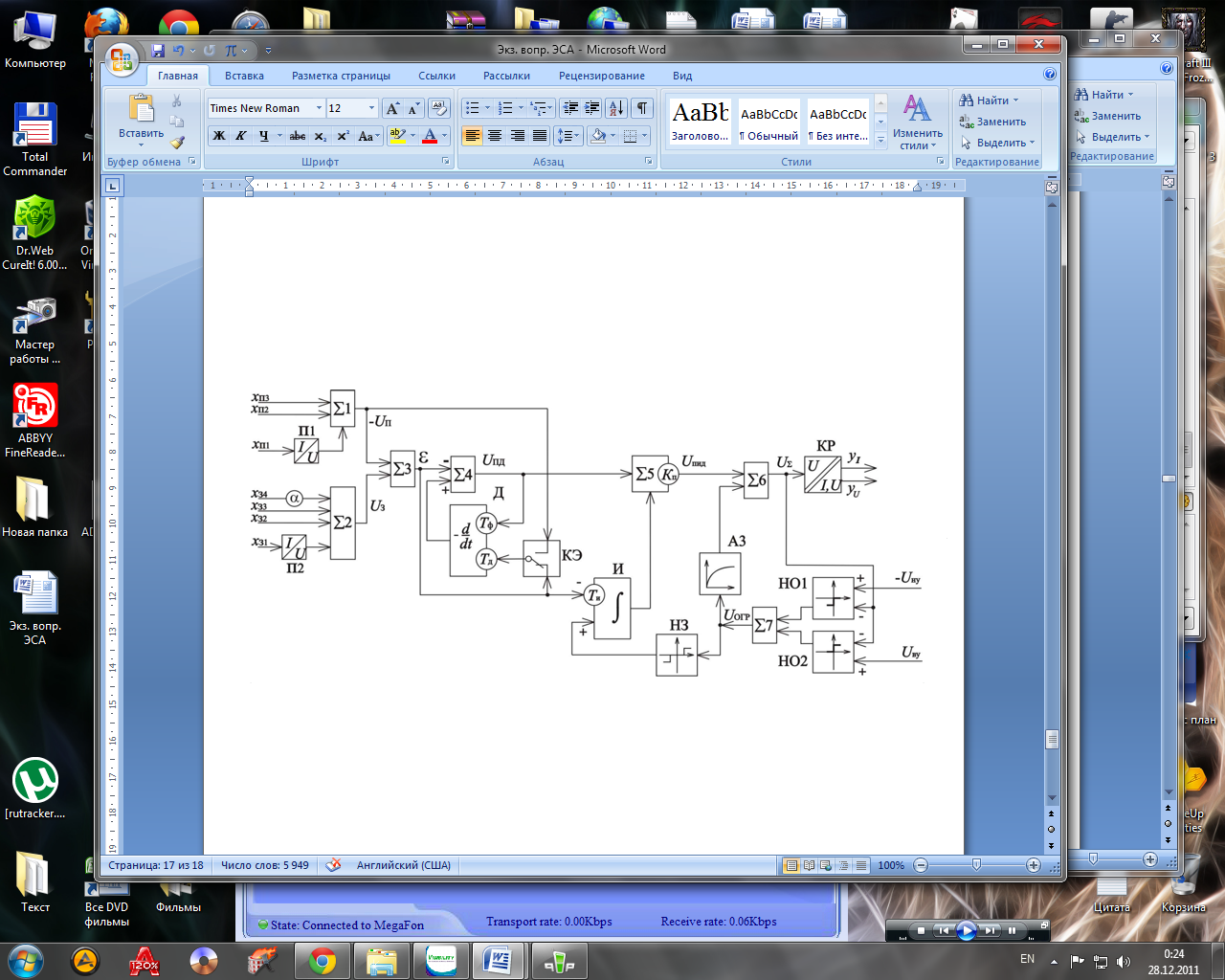
В качестве примера рассмотрим устройство и принцип работы регулирующего устройства (РУ) непрерывного действия типа РБА (рис. 4.2). РУ содержит: а) резисторные преобразователи ток – напряжение П1, П2; б) сумматоры Σ1-Σ6; в) масштабирующий преобразователь с коэффициентом α; г) двухвходовый дифференциатор Д, обеспечивающий демпфирование по входу Тф совместно с сумматором Σ4 и дифференцирование по входу Тд сигнала рассогласования , либо регулируемого параметра хП в зависимости от положения коммутирующего элемента КЭ (перемычки); д) интегратор И, формирующий интегральную составляющую в законе регулирования с постоянной времени Ти; е) однополярные нуль-органы с дифференциальными входами для ограничения выходного сигнала UΣ; ж) апериодическое звено АЗ для обеспечения устойчивой работы ограничителя во всем диапазоне уставок по нижнему Uну и верхнему Uву уровням ограничения; з) нелинейное звено НЗ для исключения работы интегратора в режиме насыщения; и) кондуктивный разделитель КР для гальванической развязки входных и выходных цепей РУ и преобразования сигнала UΣ в двуполярный сигнал по напряжению yU и однополярный сигнал yI. В сумматоре Σ1 суммируются входные сигналы регулируемого параметра в виде напряжений (0–10) В по входам xП2, хП3 или токов (0–5), (0–20), (4–20) мА по входу xП1. В сумматоре Σ2 суммируются входные сигналы заданного значения регулируемого параметра в виде напряжений (0–10) В по входам хЗ2 – хЗ4 или токов 0–5, 0–20; (4–20) мА по входу хЗ1. Сумматоры Σ3,Σ4,Σ5, дифференциатор и интегратор образуют узел выделения сигнала рассогласования, его демпфирования и динамического ПИД-преобразования. РУ типа РБА предназначено для работы с пропорциональными исполнительными механизмами и датчиками с унифицированными выходными сигналами, а также совместно с блоками оперативного (ручного) управления и задатчиками агрегатного комплекса электрических средств регулирования АКЭСР, либо приборной системы КАСКАД.