

Автоматические регуляторы. Назначение, классификация, типы.
Автоматические регуляторы (АР) в системах автоматики выполняют функции управляющих устройств: они вырабатывают управляющие сигналы для поддержания регулируемых величин (технологических параметров) на заданном уровне либо изменения их по определенному закону, а также могут обеспечивать функции индикации, сигнализации и ручного управления процессом.
Элементы (модули) АР выполняют в разных регуляторах различный набор операций. Так модуль ввода МВ информационных сигналов в общем случае может выполнять следующие операции: потенциальное разделение сигналов (разделение по входу), их масштабирование, фильтрацию, функциональные преобразования (нелинейные, логические, динамические, математические), запоминание и др.
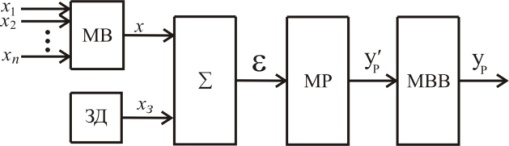
Обобщенная функциональная структура автоматического регулятора: МВ – модуль ввода сигналов от датчиков контролируемых параметров (х1, х2, …хn); ЗД – задатчик значения регулируемой величины (модуль формирования заданий); Σ – сумматор сигналов задания и контролируемых величин; МР – модуль формирования сигнала регулирования; МВВ – модуль вывода сигналов регулятора.
По способу технической реализации закона регулирования различают аппаратные (регуляторы с жестким алгоритмом функционирования) и программируемые (регуляторы с гибким алгоритмом функционирования) АР. Достоинством последних являются широкие функциональные возможности и быстрый переход с одного закона управления на другой.
По конструктивному исполнению АР могут быть приборными (для щитового монтажа), шкафными (для монтажа в шкафу) и контейнерными (для настенного монтажа).
По виду и уровню входного сигнала различают АР с естественными входными сигналами, получаемыми от измерительных преобразователей, и АР с унифицированными входными сигналами, например 0–5 мА, получаемыми от нормирующих преобразователей или датчиков с унифицированным выходом.
По роду используемой энергии АР могут быть электрическими, пневматическими, гидравлическими или комбинированными, например электрогидравлическими.
По характеру изменения выходного сигнала АР могут быть непрерывного действия (аналоговые) и прерывистого действия (дискретные). К последним относятся позиционные, импульсные и цифровые регуляторы. Позиционные регуляторы формируют выходной сигнал, принимающий значения +-1 или 0. Их применяют для регулирования параметров объектов, обладающих большой емкостью и малым запаздыванием, например, для регулирования температуры тепловых объектов. Импульсные регуляторы целесообразно использовать для регулирования медленно протекающих процессов в объектах, обладающих большой инерционностью и значительным запаздыванием. Их выходной сигнал представляет собой последовательность импульсов постоянной частоты с изменяемой в функции рассогласования, как правило, длительностью.
По типу закона регулирования АР делятся на нелинейные (сигнал регулирования этих АР является нелинейной функцией рассогласования) и линейные. Последние по алгоритму регулирования, реализуемого регулятором, могут быть пропорциональными (П), пропорционально-интегральными (ПИ), пропорционально-интегрально-дифференциальными (ПИД).