

1.Система Си. Межд. Сист. Единиц введена в России с 1963, дожна прим-ся во всей обл-ти науки, техники и при передовании. Основные: ед длины – метр (м), ед массы – кг, ед времени – с, сила тока – ампер (А), ед термодин-ой системы – кельвин (К), ед силы света – кандела (кд), ед кол-ва вещ-ва – (моль), таким образом СИ принад-т к числу абс-х систем (системы, в основу кот-х единицы длины, массы и времени). Также: ед силы – Ньютон (Н). Размерность – соотношение, показывающее, как измен-ся единица какой-либо величины при изменении осн-ых единиц. Кг = 1000 см3 чистой воды при 4оС. Секунда = сумма 9 192 631 770 периодов излучения, соответствующего переходу м/у двумя сверхтонкими уровнями осн-го сост-я атома цезия-133, и = 1/86400 средних солн-х суток. Также в физике прим-ся абсол-я сист единиц – СГС-система(сантиметр, грамм, секунда).
2. Векторы. Их
сложение, умнож-е на число, скал-е вект-е
произ-е.Физ.
вел. могут быть скалярными, т.е. хар-ся
числ. знач. (работа, время, температура)
и вектор-ми, хар-мые числ. знач. (модуль
в-ра) и направлением (скорость, ускорение,
сила). Действия с вектор. величинами
опред-ся правилами вектор. алгебры. В-ры
можно складывать (с=а+в), разлагать на
составляющие, напр-р, парал-е осям коорд.
![]() Умножать на число (В=аА, │В│=а│А│).
Умножать на число (В=аА, │В│=а│А│).
При умн-ии в-ра на в-р различают скалярное и векторное произв-я: а) в рез-те скалярного получается скалярная величина (АВ)=Авcosα. б) в рез-те в-ного произв. получается в-р С=А*В, модуль кот. равен С=АВsinα, а напр-е опред-ся правилом буравчика.
3. Путь, перемещение, скорость и уск-е матер-й точки. Р/у движ-е…. Тело размерами кот. в данных усл-х можно пренебречь наз-ся материальной точкой. Перемещение – направ. отрезок прямой, соед-й нач. положение тела с его послед-м положением. Скорость[м/c] – в-ная физ. величина, описывающая быстроту изменения перемещения. Одномерное движ-е с пост. ск-стью опис-ся выр-ем: X = X0 + Vt. Мгновеню ск-сть опред-ся: V = dx/dt. Ускорение – быстрота изм-я скорости за ед-цу времени – в-ная величина. Мгновенное уск-е:
a = dv/dt = d2x/dt2
При пост. уск-ии:
V = V0 + at; x = x0 + V0t+at2/2;
V2=V02+2a(x-x0)
Движ-е тела брошенного под углом α к горизонту со ск-тью V: y= xtgα-(gx2/ 2V02cos2α).
Координаты наивысшей точки подъёма:x=Vo2sin2α/2g;y= Vo2sin2α/2g. Время подъёма / Дальность подьёма: t=Vosinα/g; x=Vo2sin2α/g
4. Движ-е по окруж-ти: уск, угл-я скор, угл-ое уск-е. Движением по окружности наз-ся движение мат. точки по траектории с пост. расстоянием r от центра траектории. Ускорение (центростр-е) – физ. в-на, хар-я изм-е напр-я скорости при движении по орбите в зависимости от времени. aцс = ∆v/∆t. Угловая скорость[рад/с] – физ. в-на, хар-я движение вращающегося тела. Она равна отношению изменения угла поворота ∆φ к необходимому для этого времени ∆t. У.с. в-ная величина в направлении оси вращения. ω=∆φ/∆t. Угловое уск-е [рад/с2]- физ. вел., кот. показывает быстроту изменения угловой скорости за ед-цу времени. a=∆ ω/∆t
5. Законы Ньютона. Инерциальные сист-ы отсчёта.1 з.н. Принцип относит-ти Галилея.Преобразо-е Галилея. Преобраз-е скор-ти при переходе из одной инерц-й системы в другую.
Всякое тело сохраняет состояние покоя или равномерного прямолин-го движения пока и поскольку действ-е на него силы не выведут его из этого сост-я: a = 0, если F = 0. 2 з.н. Уск-е тела прямо пропорционально равнодейств-й приложенных к нему сил и обратно проп-но его массе:F = ma и a = F/m. 3 з.н. Всякий раз, когда одно тело действует с нек-й силой на другое, со стороны 2-го тела на 1-е действует сила противодействия, равная по величине и противоположная по напр-ю силе действия: FA→B=-FB→A. Системы отсчёта, относительно которых тела движутся с постоянной скоростью при компенсации внешних воздействий на них, называются инерциальными, а 1 з.н. называют законом инерции.
З-ны мех. движ-я одинаковы для всех инерциальных систем отсчёта. Означает, что любые мех. процессы происходят одинаково, какую бы инерц. сист. отсчёта мы ни выбрали.
Преобр. Галилея:
x=x’+V0t’, y=y’, z=z’, t=t’.
Продиф-вав эти соотношения по времени, найдём связь между скоростями точки по отношению к системам отсчёта K и K’:
x=x’+V0 или Vx = Vx’ + V0
y=y’ или Vy = Vy’
z=z’ или Vz = Vz’
Эти три скалярных соотношения эквивалентны след-му соотн-ю между в-рами скорости V по отнош-ю к системе K и в-ром скорости V’ по отношению к системе K’:
V = V’ + V0
6. Сила трения. Трение покоя. Трение скольжения. Сила тр-я появл-ся при перемещении соприкасающихся тел или их частей друг относ-но друга. 1) ВНЕШНЕЕ тр-е – трение, воникающее при относит-ом перемещении двух соприкасающихся тел. 2) ВНУТРЕННЕЕ тр-е – тре-е м/у частями одного и того же сплошного тела (жидкости или газа). СУХОЕ тр – тр м/у поверх-ми 2-х твёрдых тел при отсутствии прослойки (смазки). ВЯЗКОЕ (Жидкое) – тр м/у твёрдым телом и жидкой или газообр-ой средой………………………………………………………..
7. Работа и мощность. Сила, действующая на движущееся тело совер-т над ним работу, т.е. работа описывает то, что сов-т сила, когда действуя на тело, она перемещает его на некоторое рассто-е. A=(F*s)=F*s*cosα, где α – угол м/у векторами F и s. Работа, совершаемая в единицу времени наз-ся мощностью. Если за время dt сов-ся работа dA, то мощность: P=dA/dt. P=A/t. Взяв dA в виде dA= F*ν*dt, получим для мощности: P=F*ν, согласно которому мощ-ть равна скалярному произв-ию вектора силы на вектор скорости, с кот-й движ-ся точка приложенной силы. В СИ единицей работы явл-ся джоуль (Дж), он равен работе, совершаемой силой 1 Н на пути в 1 м; За единицу мощности приним-ся мощность, при кот-й в ед времени сов-ся работа, равная единице. В СИ – Вт (ватт) = Дж/с.
8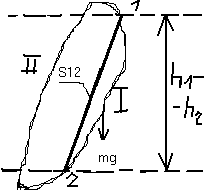 .
Консервативные силы. Потенц-я эн-я. Пот.
эн-я сжатой пружины. Для
стационарного поля (поле, остающееся
постоянным во времени) может окзаться,
что работа, совершаемая над частицей
силами поля, зависит лишь от начального
и конечного положения частицы и не
зависит от пути, по которому двигалась
частица. Силы с таким свойством наз-ся
консервативными.
Из независимости работы консерв-ых сил
от пути вытекает, что работа таких сил
равна нулю. Конс-е силы можно опред-ть
2 способами: 1) как силы, работа кот-х не
зависит от пути, по кот-му частица
переходит из одного полож-я в другое;
2) как силы, работа кот-х на любом замкну-ом
пути равна нулю. Доказ-во, что сила
тяжести – консерв-ая: эта сила в любой
точке имеет один-ую величину и один-е
напр-е (вниз). Поэтому, независимо от
того, по какому из путей (1 или 2) движ-ся
частица, работа A12=mgs12=mg(s12)пр.g.
Из рис-а видно, что проекция вектора s12
на направление
g
равна разности высот h1-h2.
След-но работа: A12=mg(h1-h2)
– не зависит от пути, след-но сила тяжести
консер-на. Такой же рез-т получается для
всякого стационарного однородного
поля. Энергия тела, обусловленная
положением тела в пространстве и его
формой наз-ся потенциальной
энергией (“когда тело в покое”). Пот-я
эн-я поднатого тела: U=mgh.
Физ-й смысл имеет только изменение пот-й
эн-ии, поскольку именно оно связано с
совершаемой работой ΔU=U2-U1=-mg(h2-h1),
где h2-h1=h.
Пот-ая эн-я
сжатой пружины: т.к.
это упругое тело, значит подчиняется
закону Гука F=-kx,
след-но пот эн U=(kx2)/2.
.
Консервативные силы. Потенц-я эн-я. Пот.
эн-я сжатой пружины. Для
стационарного поля (поле, остающееся
постоянным во времени) может окзаться,
что работа, совершаемая над частицей
силами поля, зависит лишь от начального
и конечного положения частицы и не
зависит от пути, по которому двигалась
частица. Силы с таким свойством наз-ся
консервативными.
Из независимости работы консерв-ых сил
от пути вытекает, что работа таких сил
равна нулю. Конс-е силы можно опред-ть
2 способами: 1) как силы, работа кот-х не
зависит от пути, по кот-му частица
переходит из одного полож-я в другое;
2) как силы, работа кот-х на любом замкну-ом
пути равна нулю. Доказ-во, что сила
тяжести – консерв-ая: эта сила в любой
точке имеет один-ую величину и один-е
напр-е (вниз). Поэтому, независимо от
того, по какому из путей (1 или 2) движ-ся
частица, работа A12=mgs12=mg(s12)пр.g.
Из рис-а видно, что проекция вектора s12
на направление
g
равна разности высот h1-h2.
След-но работа: A12=mg(h1-h2)
– не зависит от пути, след-но сила тяжести
консер-на. Такой же рез-т получается для
всякого стационарного однородного
поля. Энергия тела, обусловленная
положением тела в пространстве и его
формой наз-ся потенциальной
энергией (“когда тело в покое”). Пот-я
эн-я поднатого тела: U=mgh.
Физ-й смысл имеет только изменение пот-й
эн-ии, поскольку именно оно связано с
совершаемой работой ΔU=U2-U1=-mg(h2-h1),
где h2-h1=h.
Пот-ая эн-я
сжатой пружины: т.к.
это упругое тело, значит подчиняется
закону Гука F=-kx,
след-но пот эн U=(kx2)/2.
9. Закон всемирного тяготения. Уск-е своб-го падения. Пот-я эн-я гравитационого поля. Все тела в природе взаимно притягивают друг друга. Ньютоном установлен закон всемирного тяготения: сила, с которой две материальные точки притягивают друг друга, пропорциональна массам этих точек и обратно пропорциональна квадрату расстояния м/у ними. F=G(m1*m2)/r2. G – гарвит-я пост-я. Смла напрвлена вдоль прямой, проходящей через взаимодействующие материал-е точки. В векторном виде силу, с кото-й вторая мат-я точка притягивает к себе первую: F12=G*((m1*m2)/r2)*e12 [1]. e12 – единичный вектор, его напр-е от первой мат-й точки ко второй. Если заменить вектро e12 на e21 то получим силу F21, действующую на вторую мат-ю точку. Если одно из тел явл-ся шаром большого радиуса (земной шар), а второе тело мат-я точка, то их взаимодействие опис-ся формулой 1, в которой r – рас-е от центра шара до мат-й точки. g – уск-е своб-го пад-я, кот-е действует на все тела у пов-ти Земли = 9.81 м/с2. Пот-я эн-я грав-го поля. Грав-е поле созд-ся закреплённой в начале коорд-т мат-ой точкой массы m1, тогда на мат-ю точку m2 в точке на рассто-нии r будет действ-ть сила: F=Εm2=-G *((m1*m2)/r2)*er (E- напряжённость поля), пот-я эн-я точки опр-ся: U=-G(m1*m2)/r2.
10. Кинет-я эн-я. Кинет. энергия – это энергия мех. движ-я. Eкин = mV2/2. Теорема о связи работы и кин. энергии: работа равна приращению кин. энергии A = mV22/2 – mV12/2. Вывод теоремы: П. тело массы m, нах-ся в сост. отн-ного покоя, под действием силы F перемещается без трения и сопротивления. Работа приложенной силы A = Fs. Тело приобретает уск-е a, т.е. F = ma, а перемещение равноускоренного движ-я S= at2/2. Подставив в ф-лу работы вместо F и s их выр-я, получим A = ma2t2/2 или A = mV2/2, где V = at. При торможении движ-ся тело может выполнить работу, равную mV2/2. Выр-е mV2/2 – кин. энергия тела. Wk = mV2/2. Если тело до действия F имело нач. скорость V1, то S = (V22-V12)/2a. И ф-ла работы примет вид
A = ma(V22-V12)/2a = mV22/2 – mV12/2,
Т.е. работа- мера изм-я кин. энергии.
11. Импульс. З-н сохр-я импульса. Импульс – это физ-я величина, равная произведению массы тела на его скорость. Физ смысл: мера механического движения (количество движения). P=mν. З-н сохр-я импульса: импульс замкнутой системы мат-ых точек остаётся постоянным. Док-во: рассмотрим систему N взаимодействующих частиц. Напишем F=dp/dt ур-е для всех частиц:
Сложим вместе эти N ур-й. F12+F21=0, и подобное также, след-но справа остнутся только внешние силы, тогда: d/dt (p1+ p2+…+ pN) = F1+F2+… FN= ΣNi=1Fi. Сумма импульсов частиц, образующих механ-ую систему, наз-ся импульсом системы: p= ΣNi=1pi= ΣNi=1mi νi, отсюда следует, что импульс аддитивная величина (свойство величин, состоящее в том, что знач-е величины, соответств-ее целому объекту, равно сумме знач-й величин, соответств-их его частям), тогда: (d/dt)p= ΣNi=1Fi. Отсюда: при отсутствии внешних сил dp/dt =0, след-но для замкн-ой системы p постоянен – з-н сохр. имп-са.
1 2.
З-н сохр-я мех-ой энергии. Упр и неупр
столкно-я. Для
замкнутой консервативной системы сумма
для идеальных процессов(в отсутствие
трения)Ек
и Еп
const,
т.е. Eполн.=
Ек+U=const.
2.
З-н сохр-я мех-ой энергии. Упр и неупр
столкно-я. Для
замкнутой консервативной системы сумма
для идеальных процессов(в отсутствие
трения)Ек
и Еп
const,
т.е. Eполн.=
Ек+U=const.
Удар:упругий(деформации восстанавливаются; переносится только мех. энергия, действует закон сохр. и превращения мех. энергии) и неупругий(деф-ции не восст-ся; з-н сохр. и превращ-я мех. энергии не действует, т.к. часть мех. энергии преобразовалась во внутр. энергию).
Сохр. импульса:
У: m1V1+m2V2=m1U1+m2U2
НЕУ: m1V1+m2V2=(m1+m2)U
Абсол. упр-й – мех. энергия не переходит в другие виды энергии.
Абсол. неупр-й – кин. энергия переходит во внутр-ю.
13. Момент силы. Условие равновесия тв-ых тел. .М.С.- в-ная физ. вел., хар-я действие силы за промежуток времени.
Момент силы М = векторному произведению радиус-вектора r на действующую силу F: M=F (r·sinα.)
r·sinα.-плечо. Усл. равновесия:1)результирующая всех внешних сил, приложенных к телу=0:
F=∑Fi;внеш=0.2)суммарный момент внеш. сил отн-но любой точки=0:
М=∑Мi:внеш=0.
14. Центр масс системы матер-ых точек и твёрдого тела. Теорема о движении центра масс. Центром масс системы называется точка системы, положение которой задаётся радиус-вектором R c. R c=∑miRi/∑mi=∑miRi/М
Разбив тело на элементарные массы, можно представить его как систему мат. точек.М=∑mi
miwi=fi+Fi(внутрен. силы +внешние)
∑miwi=∑fi+∑Fi, но ∑fi=0, сл-но
∑miwi=∑Fi, т.к. R c=∑miRi/М, сл-но
∑miwi=mwc, а mwc=∑Fвнеш.
Центр масс твёрдого тела движется так, как двигалась бы мат. точка с массой, равной массе тела, под действием всех приложенных к телу сил.
15. Моемент инерции матер-ой точки и тв-го тела. Теорема Гюйгенса-Штейнера.. М.И.- физ. вел. хар-я вращающегося вокруг оси тела. Зависит от распределения его массы по отношению к оси вращения.
Момент инерции - сумма произведений масс на квадраты их расстояний до оси вращения.I=∑miri2
М. инерции мат. точки I=mr2
М. инер. сплошного диска I=½mr2
М. инерции полой тонкостенной сферы I=⅔ mr2
М. ин. однородного шара I=(2/5) mr2
М. ин. стержня ч-з середину I=(ml2)/R
Т. Г.-Ш.:I=Io+mr2 момент инерции I отн-но любой оси равен моменту инерции отн-но оси ║-ой данной и проходящей через центр масс тела+mr2,где r-расстояний м/у осями.
1
 6.
Ур-е вращательного движения. Вращательное
движение
твёрдого тела, 1) вращат-е движ-е вокруг
оси — движ-е твёрдого тела, при кот-м
какие-нибудь две его точки А
и В
остаются всё время неподв-ми (см. рис.).
Ур-е:
φ= φ(t),
т.е. измен-е угла поворота засисит от
хара-ра вращ-го дви-я.Прямая AB,
проходящая через эти точки, наз-ся осью
вращения; все точки тела при В. д. описывают
окруж-ти в плоскостях, перпенд-ых к оси
вращ-я, и с центрами, лежащими на этой
оси. Тело, совершающее В. д., имеет одну
степень свободы и его полож-е опред-ся
углом φ между проведёнными через ось
вращ-я неподвижной полуплоскостью и
полуплоскостью, жёстко связанной с
телом и вращающейся вместе с ним. Осн-е
кинемат-ие характ-ки В. д. тела – его
угловая
скорость
(величина,
характеризующая быстроту вращения
твёрдого тела)
ω и угловое
ускорение ε
(величина,
характеризующая быстроту изменения
угловой
скорости).
Для любой точки тела, отстоящей от оси
на расстоянии h,
лин-я скорость v
= hω,
касат-ое уск-е wτ
= hω,
нормальное уск-е wn
= hω2
и полное уск-е w=h√(ε2+
ω4).
Осн-ми динамическими характе-ми В. д.
тела явл-ся его кинет-й момент относ-но
оси вращ-я Kz
= Izω
и кин-я эн-я Т
=
1/2
Izω2,
где Iz
— момент
инерции
тела
относительно оси вращ-я. Закон вращ-я
опред-ся из осн-го ур-я Iz
ε
= Mz,
где Mz
—
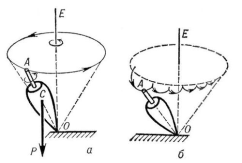
вращающий момент. 2) Вращ-е движ-е вокруг
точки (или сферическое движение) —
движ-е тв-го тела, при кот-м какая-то одна
его точка О
остаётся неподв-ой, а все другие точки
движутся по поверх-ти сфер, имеющих
центр в точке О.
При таком В. д. тела любое его элемент-ое
перемещение представляет собой элемант-й
поворот вокруг некоторой оси, проходящей
через точку О
и наз-ся мгновенной осью вращ-я. Со
временем эта ось, в отличие от неподвижной,
непрерывно изменяет своё напр-е. В
результате В. д. тела слагается из серии
элемент-ых поворотов вокруг непрерывно
меняющих своё напр-е мгновенных осей.
Пример: гироскоп
(быстро
вращающееся твёрдое тело, ось вращения
которого может изменять своё направление
в пространстве).
6.
Ур-е вращательного движения. Вращательное
движение
твёрдого тела, 1) вращат-е движ-е вокруг
оси — движ-е твёрдого тела, при кот-м
какие-нибудь две его точки А
и В
остаются всё время неподв-ми (см. рис.).
Ур-е:
φ= φ(t),
т.е. измен-е угла поворота засисит от
хара-ра вращ-го дви-я.Прямая AB,
проходящая через эти точки, наз-ся осью
вращения; все точки тела при В. д. описывают
окруж-ти в плоскостях, перпенд-ых к оси
вращ-я, и с центрами, лежащими на этой
оси. Тело, совершающее В. д., имеет одну
степень свободы и его полож-е опред-ся
углом φ между проведёнными через ось
вращ-я неподвижной полуплоскостью и
полуплоскостью, жёстко связанной с
телом и вращающейся вместе с ним. Осн-е
кинемат-ие характ-ки В. д. тела – его
угловая
скорость
(величина,
характеризующая быстроту вращения
твёрдого тела)
ω и угловое
ускорение ε
(величина,
характеризующая быстроту изменения
угловой
скорости).
Для любой точки тела, отстоящей от оси
на расстоянии h,
лин-я скорость v
= hω,
касат-ое уск-е wτ
= hω,
нормальное уск-е wn
= hω2
и полное уск-е w=h√(ε2+
ω4).
Осн-ми динамическими характе-ми В. д.
тела явл-ся его кинет-й момент относ-но
оси вращ-я Kz
= Izω
и кин-я эн-я Т
=
1/2
Izω2,
где Iz
— момент
инерции
тела
относительно оси вращ-я. Закон вращ-я
опред-ся из осн-го ур-я Iz
ε
= Mz,
где Mz
—
вращающий момент. 2) Вращ-е движ-е вокруг
точки (или сферическое движение) —
движ-е тв-го тела, при кот-м какая-то одна
его точка О
остаётся неподв-ой, а все другие точки
движутся по поверх-ти сфер, имеющих
центр в точке О.
При таком В. д. тела любое его элемент-ое
перемещение представляет собой элемант-й
поворот вокруг некоторой оси, проходящей
через точку О
и наз-ся мгновенной осью вращ-я. Со
временем эта ось, в отличие от неподвижной,
непрерывно изменяет своё напр-е. В
результате В. д. тела слагается из серии
элемент-ых поворотов вокруг непрерывно
меняющих своё напр-е мгновенных осей.
Пример: гироскоп
(быстро
вращающееся твёрдое тело, ось вращения
которого может изменять своё направление
в пространстве).
17. Момент импульса. З-н сохр-я момента импульса. М.и. – в-ная физ. вел., хар-я состояние движения вращающегося тела с учётом момента инерции. Для неподвиж. осей напр-е момента совпадает с напр-м угл-й скорости. М.и. явл. величиной процесса.
L = Iω [кг*м2/с]
Вращат. Момент: M = dL/dt
З-н сохр. м.и.: в замкнутой сист. сумма моментов импульса постоянна.
I1ω1=I2ω2; ∑L=∑Iω=const; dL=0
Условие: внешняя сила Fвн = 0 или внеш. вращ. Момент Мвн = 0.
М.и. тв. тела отн-но неподвижной оси явл. пост. до тех пор, пока на тело не действует внеш. вращательный момент.
18. Кинетическая энергия одной частицы вращающего тела равна
![]() Суммируя
энергию частиц, получаем выражение для
кинетической энергии вращающегося тела
Суммируя
энергию частиц, получаем выражение для
кинетической энергии вращающегося тела
![]() Если
тело одновременно участвует в
поступательном и вращательном движении,
то его кинетическая энергия равна сумме
Если
тело одновременно участвует в
поступательном и вращательном движении,
то его кинетическая энергия равна сумме
![]() и
и
![]()
![]()
Момент инерции
тела равен:
Момент инерции
тела равен:
![]() где
ρ - плотность тела. Тонкий однородный
стержень длиной L (ось вращения на конце
стержня): m1 = m
где
ρ - плотность тела. Тонкий однородный
стержень длиной L (ось вращения на конце
стержня): m1 = m
![]() L
− масса на единицу длины,.
L
− масса на единицу длины,.
Тонкий однородный
стержень длиной L (ось в центре):
![]() .
.
![]() Обруч
(ось в центре):.
Обруч
(ось в центре):.
Пластина (ось в центре): m2 = m / ab,
![]()
Кольцо (ось в
центре):
![]() −
масса на единицу площади,
−
масса на единицу площади,
![]()
![]() Диск
(ось в центре):
Диск
(ось в центре):
![]()
![]() Шар(ось
в центре):,
Шар(ось
в центре):,
![]()
![]() сложив
эти интегралы, получаем:, в сферической
системе координат
сложив
эти интегралы, получаем:, в сферической
системе координат
![]()
19. Колебания. Гармонический осциллятор. это колеб-я, движ-я (изменения состояния), обладающие той или иной степенью повторяемости. Свободные кол-я – к-я, кот-е происходят без внешнего воздействия, то есть был сообщён толчок, потом внешних сил нет (маятник). Вынужденные – в процессе кот-х воздействуют внешние период-ки изменяющиеся силы (люди по мсоту “в ногу”). Автокол-я – как вынужденные, но система сама управляет внешним воздествием (часы, в кот-х маятник поучает энергию за счёт поднятой гири). При параметрических кол-ях за счёт внешнего возде-я происходит период-е изм-е какого-либо парам-а системы (например: длина нити маятника). Осциллятор (качаюсь) – физ-я система, совершающая кол-я. Термин О. – мех система, совершающая колебания около положения устойчивого равновесия. В положении равновесия потенциальная энергия U системы имеет минимум. Если отклонения х от этого положения малы, то в разложении U (x) по степеням х можно считать U (x) = kx 2/2 (k — постоянный коэффициент); при этом квазиупругая сила F =- ∂U/∂x= -kx . Такие О. Наз-cя гармоническими, их движ-е опис-ся лин-ым ур-м , реш-е кот-го имеет вид х = A sin (wt + φ), где m — масса О., w=k/m – частота, А – амплитуда кол-й, φ — начальная фаза, t — время. Полная эн-я гарм-го О. Е = mw2А2/2 — это сумма период-ки меняющихся в противофазе кин-ой Т и пот-й U энергий; Е = Т + U не зависит от времени. Когда отклонение х нельзя считать малым, в разложении U (x) необх-м учёт членов более высокого порядка – ур-е движ-я становится нелинейным, а О. называется ангармоническим.
20. Мат-й маятник. Его период. М.м. – материал-я точка, совершающая под действием силы тяж-и кол-я вдоль дуги окр-ти, расположе-ой в верт-й плоскости. М.м: груз нерастяж-й нити, его размеры малы по сравнению с длиной нити, масса нити мала по сравн-ю с массой груза. Если отклонения М.м. малы, он совер-т кол-я, близкие к гарм-им, с периодом: T=2π*√(l/g).
2![]() 1.
Физич-й маятник. Его период. Если
колеблющееся тело нельзя рассматривать
как материальную точку, то М. называется
физическим. Движение такого М. вполне
аналогично движению кругового
математического М. При малых углах
отклонения j М. также совершает колебания,
близкие к гармоническим, с периодом
T=2π*√(lпр/g),
где lпр
=I/ml
– приведённая длина – это длина физ-го
маятника, преиод кол-й котого совпадает
с периодом кол-й данного физ-го мая-ка,
где I
—
момент
инерции
М. относительно оси подвеса, l
— рассто-е от оси подвеса O
до центра тяжести C,
M
— масса М.
1.
Физич-й маятник. Его период. Если
колеблющееся тело нельзя рассматривать
как материальную точку, то М. называется
физическим. Движение такого М. вполне
аналогично движению кругового
математического М. При малых углах
отклонения j М. также совершает колебания,
близкие к гармоническим, с периодом
T=2π*√(lпр/g),
где lпр
=I/ml
– приведённая длина – это длина физ-го
маятника, преиод кол-й котого совпадает
с периодом кол-й данного физ-го мая-ка,
где I
—
момент
инерции
М. относительно оси подвеса, l
— рассто-е от оси подвеса O
до центра тяжести C,
M
— масса М.
22. Затухающие кол-я. Логарифмический декремент затухания. Затух-е кол-я – кол-я, у кот-х умен-ся интенсивность кол-й с теч-м времени, обусловленное потерей эн-ии колеб-ой системой (потеря эн-ии = превращение её в тепло вследствие трения в мех-х системах и сопрот-я в электр-х системах). Главным явл-ся случай, когда З. к. обусловлено уменьшением эн-ии, пропорц-ым квадрату скорости движ-я в мех-й системе (квадрату силы тока в электрической системе); это справедливо для линейных систем. Тогда З. к. имеет экспоненциальный характер, т. е. размахи кол-й убывают по зак. геом-ой прогрессии . Потери эн-ии в системе, вызывая З. к., нарушают их периодичность, значит затухающие кол-я не явл-ся период-м процессом (к ним неприменимо понятие периода или частоты). Но когда затухание мало, состояния в системе приблиз-о повтор-ся и можно пользоваться понятием периода как промежутка времени между двумя последующими прохождениями колеблющейся физической величины (тока, напряжения, размаха колебаний маятника) в одну и ту же сторону через макс-е знач-е. Оценку относительного уменьшения амплитуды колебаний за период даёт логарифмический декремент затухания – количеств-я характ-ка быстроты затухания кол-й. Д. з. δ равен натуральному логарифму отнош-я 2-х последующих макс-ых отклонений х колеблющейся величины в одну и ту же сторону: δ=ln(x1/ x2). Д. з. – величина, обратная числу кол-й, по истечении кот-х амплитуда убывает в е раз. Например, если δ = 0,01, то амплитуда умен-ся в е раз после 100 колебаний. Д. з. характеризует число периодов, в теч-е кот-х происходит затух-е кол-й, а не время такого затух-я. Полное время затухания определяется отношением Т/δ.
23.Вынужденные колебания. Зависимость амплитуды колебаний от частоты внешней силы. Резонанс. Резонансная частота. Колебания, совершающиеся под действием внешней периодической силы, называются вынужденными. Внешняя сила обеспечивает приток энергии к системе и не дает колебаниям затухать, несмотря на действие сил трения.
Особый интерес представляет случай, когда внешняя сила, изменяющаяся по гармоническому закону с частотой ω, воздействует на колебательную систему, способную совершать собственные колебания на некоторой частоте ω0. Если собственные колебания происходят на частоте ω0, которая определяется параметрами системы, то установившиеся вынужденные колебания всегда происходят на частоте ω внешней силы. После начала воздействия внешней силы на колебательную систему необходимо некоторое время Δt для установления вынужденных колебаний. Время установления по порядку величины равно времени затухания τ свободных колебаний в колебательной системе. Примером колебательной системы, способной совершать вынужденные колебания, может служить груз на пружине, свободный конец которой перемещается по гармоническому закону y=y0cosωt. Если смещение груза от положения равновесия обозначить через х, то удлинение пружины Δl=x-y=x-y0cosωt
Упругая сила F, действующая на груз, есть F=-k Δl=-kx+ky0cosωt
Здесь k - коэффициент жесткости пружины. 2-ой закон Ньютона запишется в виде
x+ω02x=(ky0cosωt)/m=ω02y0cosωt. Это уравнение называют уравнением вынужденных колебаний. Величина ω0 есть собственная частота колебаний, ω - частота внешней силы.
Амплитуда x0 вынужденных колебаний зависит от соотношения частот ω0 и ω и от амплитуды вынуждающей силы ky0. Если частота ω внешней силы приближается к собственной частоте колебаний ω0, возникает резкое возрастание амплитуды вынужденных колебаний. Это явление называется резонансом. Зависимость амплитуды x0 вынужденных колебаний от частоты ω вынуждающей силы называется резонансной характеристикой.
В отсутствие затухания амплитуда вынужденных колебаний при приближении к резонансу бесконечно растет. Однако в любой колебательной системе неизбежно присутствуют силы трения. Чем меньше трение в колебательной системе, тем сильнее возрастает амплитуда вынужденных колебаний при резонансе.