

20 Уровень сложности системы
Уровень сложности технического процесса отражается на конфигурации управляющего компьютера. Количество датчиков и исполнительных механизмов определяет число портов ввода/вывода и в целом требует более мощного процессора, большего объёма оперативной и внешней памяти и т.д. Связь между внутренними переменными процесса и его входными и выходными данными определяет сложность программного обеспечения регулятора. Программы реального времени гораздо труднее тестировать по сравнению с обычными программами, поэтому их ход должен быть настолько хорошо структурирован, чтобы ошибки можно было выявить как можно раньше.
21 Интерфейс оператора
Хотя теоретически управляющая система или компьютер могут функционировать без вмешательства человека, на сегодняшний день всегда необходимо взаимодействие с оператором, который должен получать информацию и иметь возможность вводить команды. Графические интерфейсы компьютерных терминалов становятся все более совершенными. Современные дисплеи обладают большими возможностями отображения сложно организованных данных, включая цветовые палитры с миллионами оттенков, разнообразную графику и даже мультипликацию. Однако всё это требует больших вычислительных ресурсов, за которые программы интерфейса будут конкурировать с модулями обработки данных и поэтому оператор может получать информацию с задержкой. С другой стороны, не вся информацию может ждать, например, сигналы тревоги и другие важные сообщения должны отображаться немедленно. Поэтому при проектировании интерфейса, необходимо тщательно отбирать информацию и сопоставлять способ отображения со степенью ее важности в текущий момент, человеческими возможностями воспринимать и адекватно реагировать на нее имеющимися ресурсами.
22. Система интеграции и надежность управления
Ключевой вопрос любой СУ является надежность. Один из основных принципа прямого цифрового управления – это низкая надежность. Хотя общее качество вычисления технических систем остается одной из главных задач, т.к. центральный компьютер по-прежнему представляет собой критический узел, выход которого из строя приводит к остановке всей системы. Очевидно решение всей системы – это децентрализация вычислительных ресурсов, при которой не большие локальные вычислительные устройства управляются отдельными частями сложного процесса.
2 3.Общая структура ввода/вывода между процессом и управляющим компьютером.
24 Датчики
Измерительные устройства или датчики состоят из 2-х частей: измерительной головки и преобразователя как показано на рисунке:
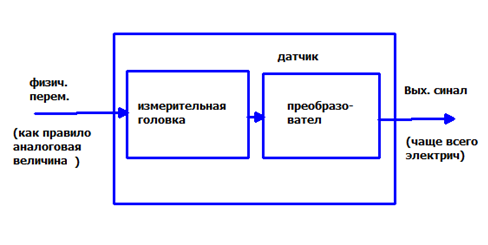
Термин датчик иногда ошибочно употребляют вместо измерительной головки.
Часто под датчиком понимается полное устройство включающее измерит головку и преобразователь.
Результат измерения --- это реакция измерительной головки датчика, кот. На входе преобразователя представляет собой эл. величину. Следовательно выходной сигнал измерительного устройства ( датчика ) есть выходной сигнал преобразователя. В большинстве управляющих систем этот выходной сигнал электрический, однако часто встречаются и пневматические датчики. Пневматические датчики, по сравнению с электрическими обычно дешевле, меньше по размеру ,проще и не чувствительны к возмущениям . более того ,в условиях взрыва и пожароопасной среды пневматические датчики более безопасные чем электрические . различают 3 плана датчиков;
Аналоговые ,т.е. вырабатывают аналоговый сигнал или двоичное слово
Цифровые ,генерирующие последовательность импульсов или двоичное слово
Бинарные ( двоичные датчики ) которые выраб. Сигнал только 2 уровней ( вкл и выкл )