6 Блок-схема управления движением поршня пресса для пластика.
Р ис.1. Алгоритм управления движения поршня.
Алгоритм управления перемещением поршня показан на рисунке 1. Компьютер выдает команду начать движение вправо, затем непрерывно контролирует информацию от датчика конечного положения до тех пор, пока не получит сигнал о том, что оно достигнуто. Затем начинается обр. движение поршня влево, при этом компьютер должен в цикле занятого ожидания ждать очередного импульса и суммирование их, т.е. счетчик импульсов обозначен n. Цикл считается завершённым при достижении зад. числа импульсов pulse.ref, затем весь цикл начинается с начала. Так же, как и при регулировании температуры, компьютер не может выполнить др. операции, пока он находится в цикле ожидания очередного импульса. Каждую из 2-х задач можно решить непосредственно с помощью последовательного кода, но объединить их в одной программе не просто. Циклы взаимного ожидания исп. нельзя, т.к. управляющий процесс не позволяет длительных задержек, а исполнение 1-й задачи не должно быть связано с другой. В принципе, можно обойтись и без циклов ожидания, однако программирование при этом будет всё время переключаться между 2-мя задачами и проверять, какая задача должна исполняться след., станет громоздкой и сложной для анализа. Попытка последовательного расположения блоков инструкции, исполнения которой фактически должно быть ||, порождает взаимосвязи м/д практически независимыми функциями.
7. Управление на основе прерываний
Главная сложность программы управления прессом – это необходимость организации переключения между задачами. На практике проблема решается с помощью 2 независимых программ, выполняемых на одной машине, а именно одна регулирует t, другая управляет перемещением поршня.
Метод сигнализации называемый прерыванием используется для переключения центрального процессора с исполнения одной задачи на другую. С помощью прерываний циклы ожидания можно заменить на ожидание прерывания. Фактически прерывание представляет собой внешний сигнал, извещающий центральный процессор о наступлении некоторого события. Событи отслеживаются датчиками и заставляют центральный процессор прервать исполнение текущей программы и перейти к другой, таким образом внешние сигналы могут влиять на исполнение того или иного программного модуля.
Особый вид прерывания связан со временем; электронный таймер выдает сигнал прервыния при наступлении определенного момента времени или по истечении некоторого интервала. Этот таймер не является частью центрального процессора, однако конструктивно располагается на той же плате, он освобождает центральный процессор от необходимости контролировать время.
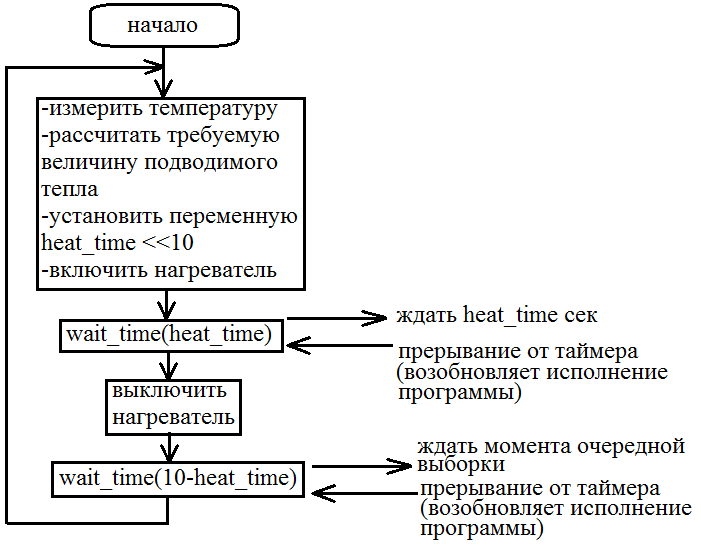
8. Использование прерываний от таймера для регулирования температуры пластика.
С использованием прерываний задача регулирования температуры решается проще. Прерывание по времени связано с переменной head_time . После включения нагревателя программа устанавливает таймер на величину времени нагрева и ждет сигнала прерывания для продолжения работы. Инструкция wait_time (head_time).