

67. Микропроцессорная система управления «сфера 36» промышленным роботом «рм-01»
Микропроц СУ Сфера36 построена по иерархичному принципу (рис) и содержит 2 уровня управления: верхний и нижний. Верхним уровнем упр решаюися след задачи: расчет алгоритмов планирования траектории движения схвата манипулятора и подготовка программ движения каждого его звена:
- логич обработка инф о состоянии устр вход в состав робототехнич комплекса и согласование работы робота в составе ртк
- обмен информацией с ЭВМ более высокого уровня
- диалоговый режим работы оператора посредством видеотерминального устр ВТУ
- чтение-запись, достоверное хранение
программ пользователя с помощью (ПРУ)
чтение-запись, достоверное хранение
программ пользователя с помощью (ПРУ)
- диагностика работы системы управоения (СУ)
- калибровка местоположения звеньев манипулятора
На нижнем уровне упр решаются задачи обработки заданных движ звеньев манипулятора, которые формируются верхним уровнем. Отработка заданных положений производится при заданных параметрах(скорость, ускор) с помощью цифровых электромех модулей, приводящих в движение звенья манипулятора
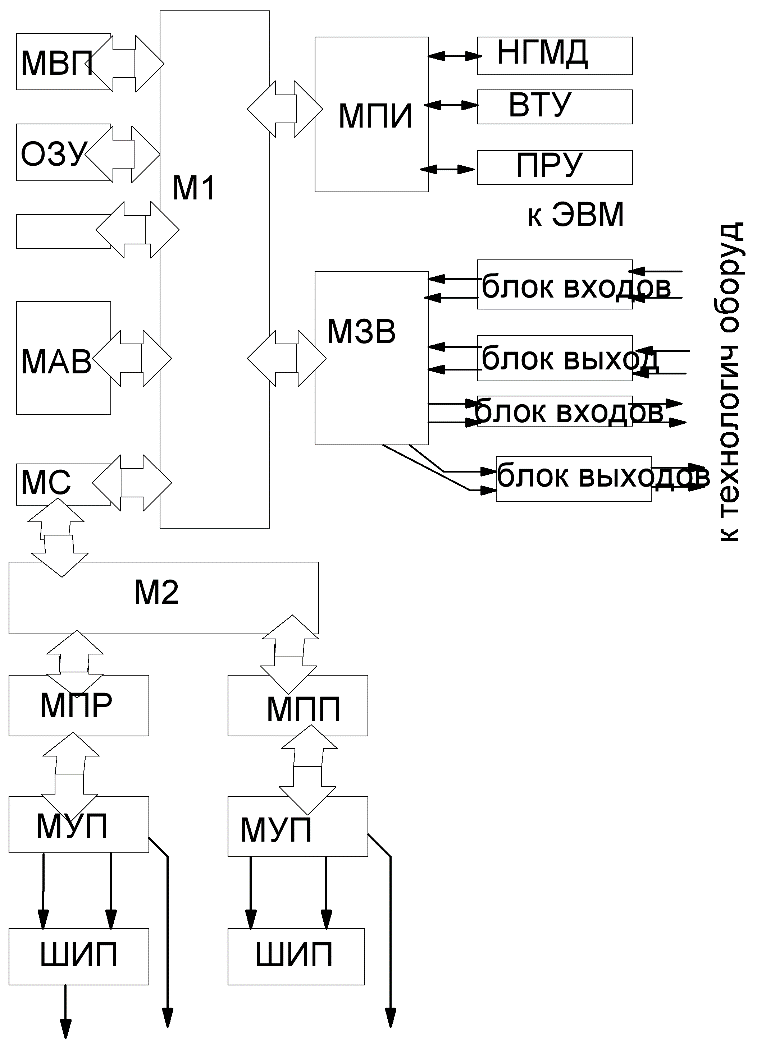
Верхний уровень упр состоит из след устр: модуля ЦП (МЦП), ОЗУ, ПЗУ, модуля аналогового ввода (МАВ), куда подаются сигналы от потенциометрических датчиков грубого отсчета положения, модули послед интерфейса (МПИ), модуля ввода/вывода МВВ, модуля связи. Обмен инф между модулями произв с помощью системой магистрали М!.
Нижний уровень упр (след рис) содержит: модуль процессора привода МПП, модуль управоения приводом МУП. Число модулей МПП и МУП соотв числу звеньев манипулятора и ровно 6. МПП соед с модулем связи с помощью системы магистралей М2 и М3. Управление двигателями постоянного тока электроприводов звеньев манипулятора производится с помощью транзисторных шир-имп преобразователей, взод в состав блока питания БП.
М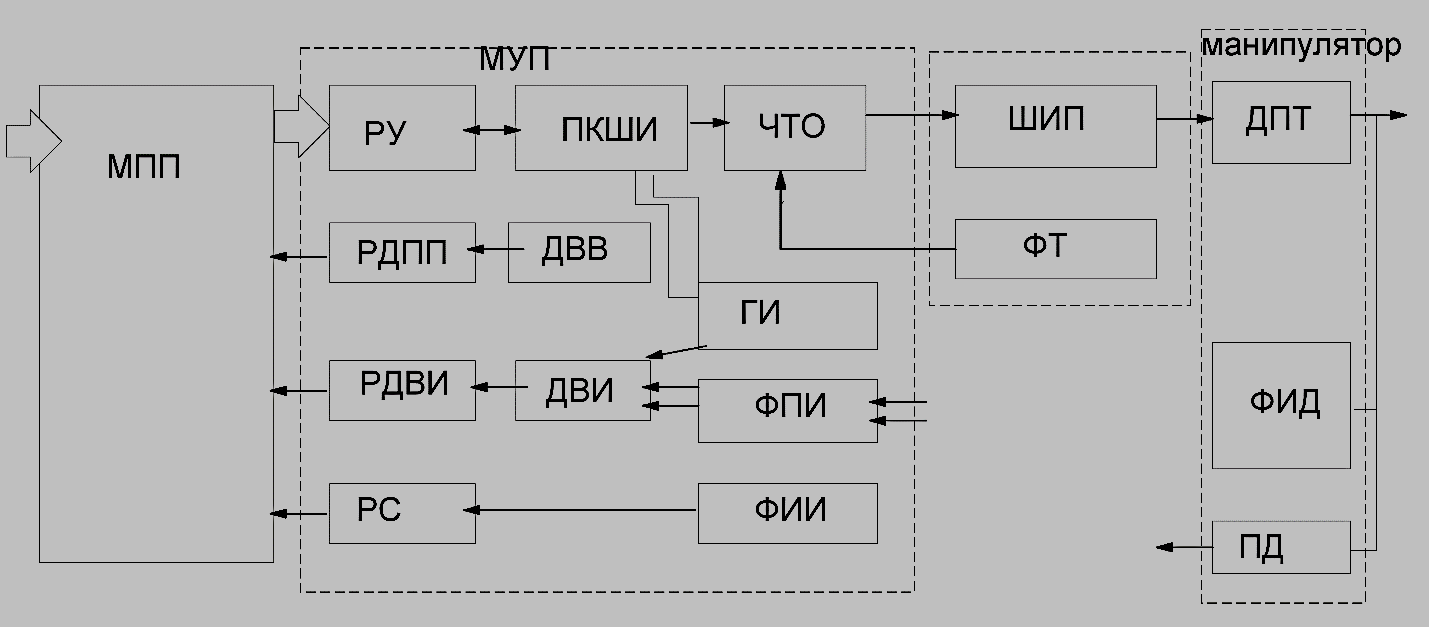 одуль
ЦП МЦП выполнен на базе микропроцессора
К1 и содержит: однокристальный процессор,
регистр начального запуска, системное
ОЗУ емкостью 32К 16-разрядн, ПЗУ емк 2К
16-разр слова, программир таймер.
одуль
ЦП МЦП выполнен на базе микропроцессора
К1 и содержит: однокристальный процессор,
регистр начального запуска, системное
ОЗУ емкостью 32К 16-разрядн, ПЗУ емк 2К
16-разр слова, программир таймер.
Модуль МЦП организует обмен информацией при помощи системной магистрали М1, функц организованной одноканальным процессором К1801ВМ1. Система команд магистрали совместима с системой команд микро ЭВМ «электроника 60» Функц схема ЭП одного звена манипулятора изображена на рис в модуле управления приводом МУП обрабатывается инф, поступ из МПП, и выраб сигналы управления преобразователем, код-ширина импульсов и ПКШИ через регистр управления РУ. ПКШИ вырабатывает сигналы по четырем каналам для упр транз ключами ШИП питающего двигателя пост тока. Помимо этого в МУП произ первичная обработка сигналов фотоэл датчика, кот вырабат 2 последовательности сигналов, смещенные друг относ друга на +-90 электр градусов в зависимости от направления движения. Этой цели служат формирователь позиц импульсов ФПИ, датчики временного интервала ДВИ и приращения позиции ДПП, которые соед с МПП через соотв регистры РДВИ и РДПП. В формирователе индексных импульсов ФИИ обраб сигнал ФИД по каналам, формир по принципу: один импульс за один оборот датчика. ФИИ и ФПП соед черезрегистр счета РС. Благодаря схемным решениям МУП обеспеч повышение разреш способн ФИД в 4 раза. Синхр блоков схемы осущ генератором импульсов. УГО-устр токоограничит ДТ-датчик тока