

61. Кодовые датчики
Кодовые датчики как и импульсные строятся в виде кодовых линеек или дисков. В кодовых датчиках каждому положению исполнительного органа соответствует определенная кодовая комбинация являющаяся числовым эквивалентом данного положения. Наибольшее распространение в системах ЧПУ находят кодовые датчики с маской двоичного кода.
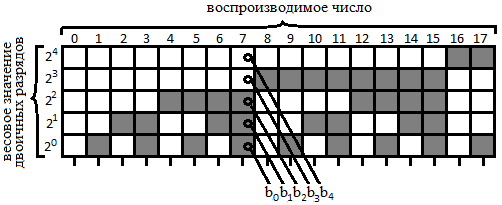
Так как и все другие блоки системы ЧПУ работает в двоичном коде. Воспроизведение информации в таком датчике осуществляется одновременно по всем разрядам с помощью чувствительных элементов b0-b4.
62. Способы повышения достоверности воспроизведения информации кодовых датчиков
Эти датчики, как и импульсные, строятся в виде кодовых ячеек. В них каждому положению ИО соотв опред кодовая комбинация, явл числовым эквив данного полож.
Все блоки работают в двоичном коде. Воспроизв инф в таком датчике осущ одновременнопо всем разрядам с пом чувст элем b0-b4
Однако, если воспроизв инф осущ на границе смежных кодовых комбинаций, то возможны значит ошибки воспроизв.
Например при смещ вправо чувствит элем b3, вместо числа 3 может оказ число 15. Чтобы исключить большие ошибки воспроизв, прибегают к дискретизации воспр и V-образному способу.
При дискретизации воспроизведения предусматривается доп шкала с ценой младшего разряда. На шкале разнесены узкие полосы, каждая из которых расположена строго посередине шага младшего разряда. Достоверная инф воспроизводится в моменты прохождения узких полос с доп шкалы над чувств элем. Этот способ значит уменьш вероятность ошибки, но не устраняет ее полностью.
Более радикальным является V-обр способ воспроизв, при котором в младшем разряде устанавл 1 чувств элемент, в во всех остальных по 2 со сдвигом на пол шага вправо и влево по отнош к чувств элем предыдущего разряда. Кодовые комбинации формир с помощью логич схемы выбора чувств элем, кот работает по след принципу. Если в предыд младшем разряде был воспроизв сигнал логич единицы, то в послед сжатом разряде будет использ инф чувств элемента, обознач на рис В.
Если был воспроизв сигнал логич 0, то использ информ чувствит элем, обознач буквой b’0. Пусть зачерненный участок кодовой маски воспроизв сигналом логич 1. А не зачерненный сигнал логич 0. Когда при воспроизв сигнала 7 будут использованы сигналы чувств элем b0-b4. Благодаря такому способу ошибки воспроизв не превыш 1цы младшего раазряда. Но треб почти в 2 раза больше чувст элем.
63. Фазовые датчики
В
системах ЧПУ применяют также различные
фазовые датчики (вращательные
трансформаторы, сельсины, индуктосины
и др.). Они используются в фазовращательном
или амплитудном трансформаторном
режимах работы. В отличие от обычных
след. систем, в которых фазовые датчики
типа сельсинов и вращательные
трансформаторы применяются в паре
(сельсин-датчик – сельсин-приемник), в
системах ЧПУ устанавливается на одну
координату только один датчик, ротор
которого жестко след. С исполн. органом.
Основные свойства и особенности двух
режимов работы фазовых датчиков можно
рассмотреть на примере вращающегося
трансформатора VT.
На статоре и роторе вращающегося
 трансформатора
располог. 2 обмоток сдвинутые относ.
Друг друга в пространстве на 90. Обычно
обмотки статора использ. в качестве
первичных. В качестве измерительной
используется 1 из обмоток ротора, а
вторая обмотка ротора замыкается при
этом на сопротивление равное сопротивлению
нагрузки измерительной обмотки. При
использовании вращающегося трансформатора
в фазовращательном режиме первичные
обмотки питаются от источников, синусное
напряженияе которых сдвинуто относительно
друг друга по фазе на 90. В результате
создается круговое вращающееся магнитное
поле. В измерительной обмотке индуцируется
ЭДС, фазы которой определяются положением
ротора VT,
т.е. положением механической оси, а
следовательно и исполнительного органав
пространстве. Сравнива фазу этой ЭДС
φ0
с фазой φпр
напряжения, задаваемого программно,
можно по разности φпр-
φ0
определить
значение углового рассогласования
между заданным программно и истинным
положением исполнительного органа. В
амплитудном режиме (рис 2.12 а) напряжение
на первичных обмотках и токи в них
совпадают по фазе, а амплитуды их различны
и задаются программно. Если требуется
положение исполнительного органа
определяют углом
φпр,
но тока в первой и второй обмотках
статора должны определениями:
трансформатора
располог. 2 обмоток сдвинутые относ.
Друг друга в пространстве на 90. Обычно
обмотки статора использ. в качестве
первичных. В качестве измерительной
используется 1 из обмоток ротора, а
вторая обмотка ротора замыкается при
этом на сопротивление равное сопротивлению
нагрузки измерительной обмотки. При
использовании вращающегося трансформатора
в фазовращательном режиме первичные
обмотки питаются от источников, синусное
напряженияе которых сдвинуто относительно
друг друга по фазе на 90. В результате
создается круговое вращающееся магнитное
поле. В измерительной обмотке индуцируется
ЭДС, фазы которой определяются положением
ротора VT,
т.е. положением механической оси, а
следовательно и исполнительного органав
пространстве. Сравнива фазу этой ЭДС
φ0
с фазой φпр
напряжения, задаваемого программно,
можно по разности φпр-
φ0
определить
значение углового рассогласования
между заданным программно и истинным
положением исполнительного органа. В
амплитудном режиме (рис 2.12 а) напряжение
на первичных обмотках и токи в них
совпадают по фазе, а амплитуды их различны
и задаются программно. Если требуется
положение исполнительного органа
определяют углом
φпр,
но тока в первой и второй обмотках
статора должны определениями:
i1=Im*sinφпр*sinωt=I1sinωt i2=Im*cosφпр*sinωt=I2sinωt
Т.о. создается пульсирующие намагничивающая сила, направление в пространстве определяемая углом φпр Этот угол моделирует программное положение исполнительного органа или положение электрической оси. Син.-кос. зависимости омплитуды от задающего перемещения – нелинейные функции преобразователей. Вычисление трансформаторной ЭДС (рис 2.12б). Результирующая намагничевающая сила Fp, равная геометрической сумме намагничевающих сил первичных обмоток F1 и F2, создает поток, пронизывающий вторичную обмотку под углом π/2-(φпр- φ0), где φ0 положение оси, перпендикулярное 2чной обмотке, при этом эффективная составляюзая вектора результирующей намагничевающей силы Fэф, создающая вторичную трансформаторную ЭДС равна Fэф=Fрsin(φпр- φ0), а пропорциональная ей амплитуда ЭДС Е=Еmsin(φпр- φ0), где Еm амплитуда ЭДС полож ротора, при котором направл результир магнитного потока совпадает с осью вторичной обмотки φпр- φ0=π/2