

55. Позиционная система при отработке средних и больших перемещений.
В большинстве пром. ЭП, оснащенных позиционными системами наилучшим считается такой процесс отработки среднего перемещения при котором скорость изменяется по треугольному графику.
Это позволяет в полной мере использовать перегрузочную способность двигателя и исключает возникновение перерегулирования по положению. Для обеспечения такого характера отработки при данном значении заданного перемещения требуется определенное значение коэффициента передачи регулятора положения. При рассмотрении отработки системой средних и больших перемещений обычно делается упрощающее допущение.
Считается,
что токовый контур обладает высоким
быстродействием, а постоянная времени
фильтра тахогенератора
 .
.
 ,
благодаря чему перед. коэф. регул.
скорости
,
благодаря чему перед. коэф. регул.
скорости
 достаточно велик. Тогда даже небольшое
напряжение на вых. регул. положения
прив. к огран. регулятора скорости.
достаточно велик. Тогда даже небольшое
напряжение на вых. регул. положения
прив. к огран. регулятора скорости.
Пусть
в момент времени
 на вход системы управлением положением
подается упр. возд. в виде задания на
перемещение. Если оно достаточно велико
напряж. на выходе РП достигнет значения
ограничения
на вход системы управлением положением
подается упр. возд. в виде задания на
перемещение. Если оно достаточно велико
напряж. на выходе РП достигнет значения
ограничения
 рис. 2.7.(а)
рис. 2.7.(а)
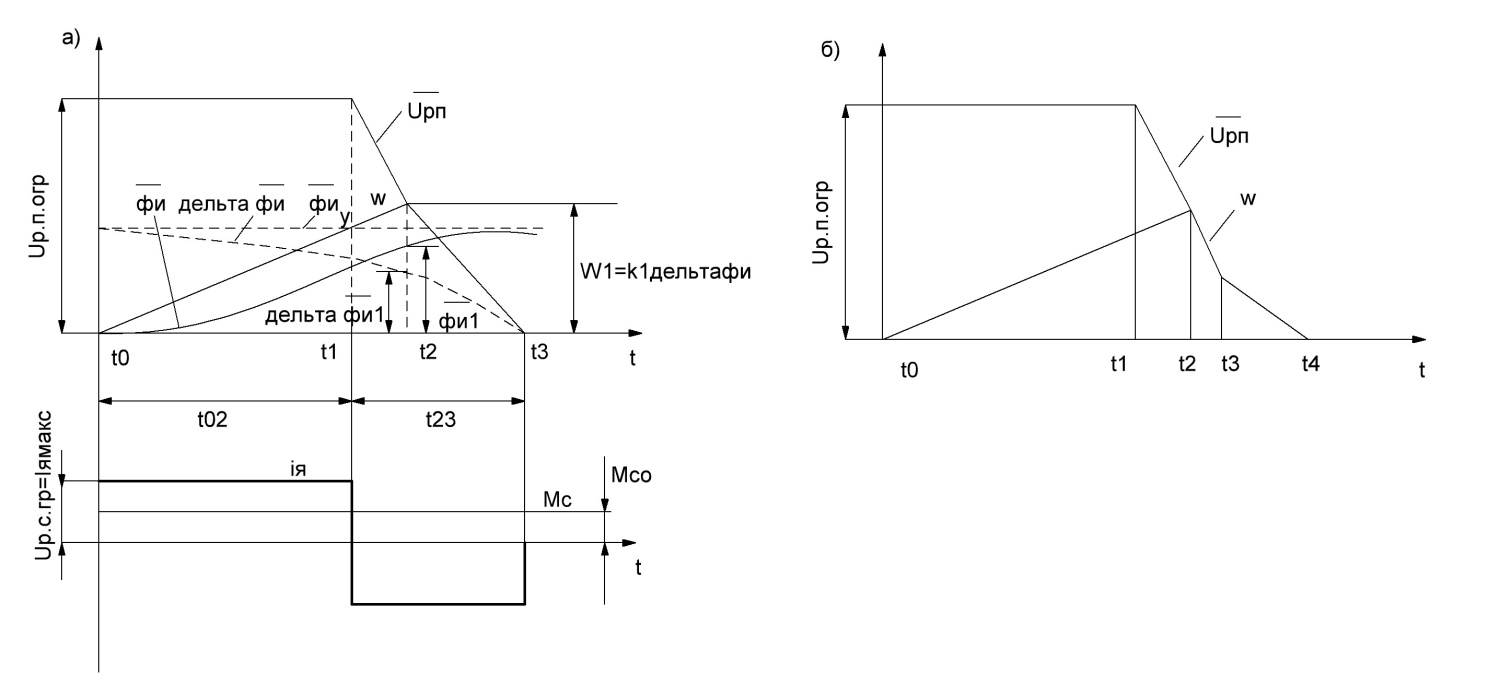
Сразу
же ограничивается и регулятор скорости.
Если,
 то разгон двигателя, под действием
момента:
то разгон двигателя, под действием
момента:
 будет происходить при постоянном
ускорении. В момент времени
будет происходить при постоянном
ускорении. В момент времени
 ,
завис. от значений:
,
завис. от значений:
 и
и
 РП
выйдет из ограничения и его напряжение
будет более меняться по закону:
РП
выйдет из ограничения и его напряжение
будет более меняться по закону:

56. Задача следящего управления положением механизма
Задачей след. управления является обеспечение перемещения исполнит. органа в соответствии с измен. по произв. закону управляющим воздействием при ошибке не превышающей допуст. значения во всех режимах в условии действия на систему на систему возмущений. Обычно полная количественная оценка точности следящей системы может быть произведена в результате рассмотрения её работы в условиях совместного влияния управл. возм. воздействия. Целесообразно разделить её реакцию на управляющее воздействие в условиях отсутствия возмущений и на основное возмущение. Обычно точность следящей системы при управлении оценивают по точности воспроизведения входного сигнала меняющегося с постоянной скоростью с постоянным ускорением или по гармоническому закону.
57. Ошибки при отработке управляющего воздействия при следящем управлении положением механизма
Поскольку контур положения содержит интегр. звено при пропорц. регуляторе положения система обладает астатизмом 1-го порядка по уравнению. Это означает, что задано ступенчатое перемещение, система настроенную на оптимум по модулю положения будет отрабатывать без устан. ошибки.
Если
в системе применен ПИ-регулятор положения
и контур положения настроен например
на симметр. оптимум, то без ошибки будет
отрабатываться не только пост. перемещения,
но и линейно изменяющийся вход. сигнал.
Обычно исходя из требований, конкретной
след. системе, проектир. задаются необход.
знач. добротности системы, по скорости
и ускорению
 Если порядок астатизма равен 1, то перед.
функция может быть записана:
Если порядок астатизма равен 1, то перед.
функция может быть записана:

Добротность
представляет собой величину:

Заданному
значению
 будет удовлетворять система низкочастотная
асимптота логарифм. амплитудно-частотной
хар-ки, которой имеющей наклон – 2-Дб на
декаду, пересечется с осью абсцисс при
частоте равной
.
В системе с астатизмом:
будет удовлетворять система низкочастотная
асимптота логарифм. амплитудно-частотной
хар-ки, которой имеющей наклон – 2-Дб на
декаду, пересечется с осью абсцисс при
частоте равной
.
В системе с астатизмом:

Низкочастотная
асимптота соотв. ЛАЧХ имеет наклон –
40 Дб на декаду и пересекает ось абсцисс
при частоте равной:
 .
.
На
практике имеют распространения след.
системы с астатизмом 1-го порядка ЛАЧХ
которых в некотором диапазоне частот
не имеют частоты среза имеют участок с
наклоном – 40 Дб на декаду. Такой хар-кой
будет обладать например система в
которой в качестве регулятора положения
использ. ПИ-регулятор с огранич. коф.
усиления в статике. В такой системе
добр. по скорости по прежнему определяется
частотой пересечения с осью абсцисс.
Частота при кот. ось абсцисс пересек.
частью ЛАЧХ, а именно продолжением
низкочастотного участка с наклоном –
40 Дб на декаду лишь приближению характер.
добротность по ускорению. Однако для
протекания этого участка порядка одной
декады можно считать, что эта частота
равна
 .
.
Ошибка системы при обраб. гармон. сигнала:

В линейной след. системе.ю так же легко определ. на осно. ЛАЧХ разомкнутой системы. Поскольку ЛАЧХ при каждой данной частоте предст. собой отношение амплитуд гармонических сигналов на выходе и входе системы можно записать:
где
 - амплитуда ошибки, так же имеющаяся по
гармоническому закону с частотой.
Следящая система стоится так, чтобы
частота среза её ЛАЧХ значительно
превышала максим. частоту гармонич.
входн. сигнала, т.к. только в этом случае
она будет удовлетворять отраб. его. Это
дает основание пренебречь удиницей по
сравнению со знач. амплитуды.
- амплитуда ошибки, так же имеющаяся по
гармоническому закону с частотой.
Следящая система стоится так, чтобы
частота среза её ЛАЧХ значительно
превышала максим. частоту гармонич.
входн. сигнала, т.к. только в этом случае
она будет удовлетворять отраб. его. Это
дает основание пренебречь удиницей по
сравнению со знач. амплитуды.
 /
/ ,
тогда справедливо примерное равенство.
,
тогда справедливо примерное равенство.
Т.е. чем меньше должна быть ошибка при данном вх. возб. тем больше должна быть амплитуда част. характ позвол. постр. желаеиую ЛАЧХ сист. так, чтобы удовл. заданные требования по точности отраб. управл. воздействия.