

52.Схема системы управления механизмом.
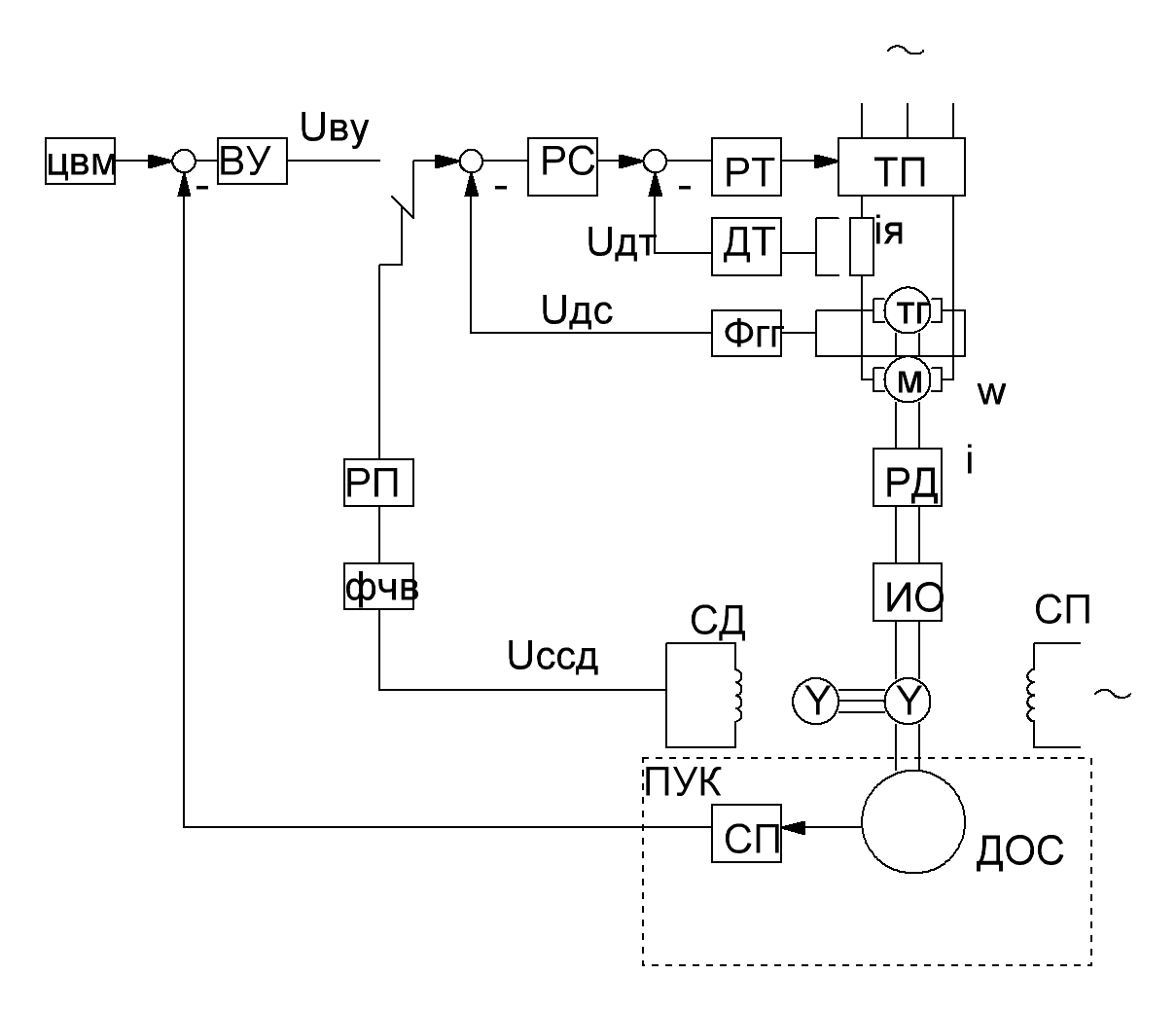
Переключатель П может осуществлять переключения аналогового либо цифрового сигнала. В первом случае измерительным элементом является сельсин, работающий в трансформаторном режиме. Сельсин-приемник СП связан с исполнительным органом ИО, который приводится в движение двигателем М через редуктор РД. Подача на вход управляющего воздействия, которым является поворот сельсина-датчика СД на некоторый угол φ относительно согласованного СП, вызывает появление на него однофазной обмотки напряжения переменного тока Uссп, значение которого определяется значением угла рассогласования, а фаза направлением поворота относительно согласованного положения, т.е. знаком угла. С помощью фазочувствительного выпрямителя ФЧВ ( полярность ФЧВ определяется знаком рассогласования) , напряжение появляется на выходе регулятора положения РП, воздействую на вход контура скорости и двигатель вращается отрабатывая рассогласование до тех пор пока φ= φу. Параметрами характеризующими изменяющую часть контура положения является передаточное число РД i, коэффициент передаточной пары сельсинов kсс, связывающий напряжение на выходе СД с угловым рассогласованием δφ и передаточный коэффициент ФЧВ kфчв. РП ограничивается, т.е. замкнутому контуру положения соответствует работа входной начальной близкой к линейной части синусоиды. Системы в ряде случаев снабжают датчиками грубого и точного отсчетов. В цифровом контуре положения измерительным элементом является дискретный датчик обратной связи ДОС. С помощью схемы преобразования СП с него снимается сигнал в двоичном коде, благодаря чему датчик вместе со схемой представляет собой преобразователь угол-код Пук. Вычислительное устройство ВУ, сравнивает полученное значение и истинное значение определяет код ошибки, а также вырабатывает в цифровой форме корректирующий сигналы преобразует результат вычислений в напряжение действующее на вход контура скорости .
53.Структура цифровой системы регулирования положения механизма.

а
Цифровые корректирующие устройства ЦКУ1, ЦКУ2 обрабатывают информацию соответственно в ЦВМ и ВУ реализуя принятие закона управления звеньями постоянного запаздывания e^t1p, e^t2p, e^t3p, учитывая время затраченное ЦВМ, ВУ и ПУК на обработку информации. Эффект квантования по времени учитывается введением суммирующих элементов. Эффект квантования по уровню обрабатывается нелинейными элементами НЭ1, НЭ2, НЭ3, имеющих релейную характеристику с числом ступеней n=2^a-1, а – число используемых двоичных разрядов. Экстрополятор Э преобразует дискретный сигнал в непрерывный. Если экстрополятор нулевого порядка, то его задача состоит в запоминании информации в течении времени равному периоду дискретности Т2.
54.Настройка системы управления положенеим механизма в режиме малых перемещений.
Малые перемещения – режим при котором не один из регуляторов не ограничивается и система работает как линейная.
Будем рассматривать настройки контура положения в относительных единицах.
Мδ=Мн, ωδ=ωн, Iяδ=Iян. Базовые параметры контура регулирования положения Uдсб=Кдсωн, Uрпб= КдсωнRзс/Rc.
Rзс и Rс – входные сопротивления РС. За базовое значение примем угол на который повернется исполнительный вал при постоянной скорости двигателя ωδ за время tδ
φδ= ωδ tδ/i
Тогда управление связывающие скорость двигателя и угла поворота исполнительного вала в относительных единицах будет: φ=ω/(pi), φ=ω/(tбр).
Если рассматривать аналоговый контур положения, за базовые значения можно принять значение напряжения фазочувствительного выпрямителя.
Uфчвб Kфчв Kcc φδ, передаточная функция
W(p)=Wрп(p) Wwз(p)/ tδор. Заменяя замкнутый контур скорости апериодическим звеном Wwз(p)=1/(Twэр+1). По оптимизации по модулю применим пропорциональный регулятор положения Wрп(p)=Крп= tδ/(2Twэ), где Twэ – эквивалентная постоянная времени замкнутого контура скорости. За базовое значение принять: tδ=1 с, тогда Крп=1/(2Twэ),
Структурная схема системы в относительных единицах
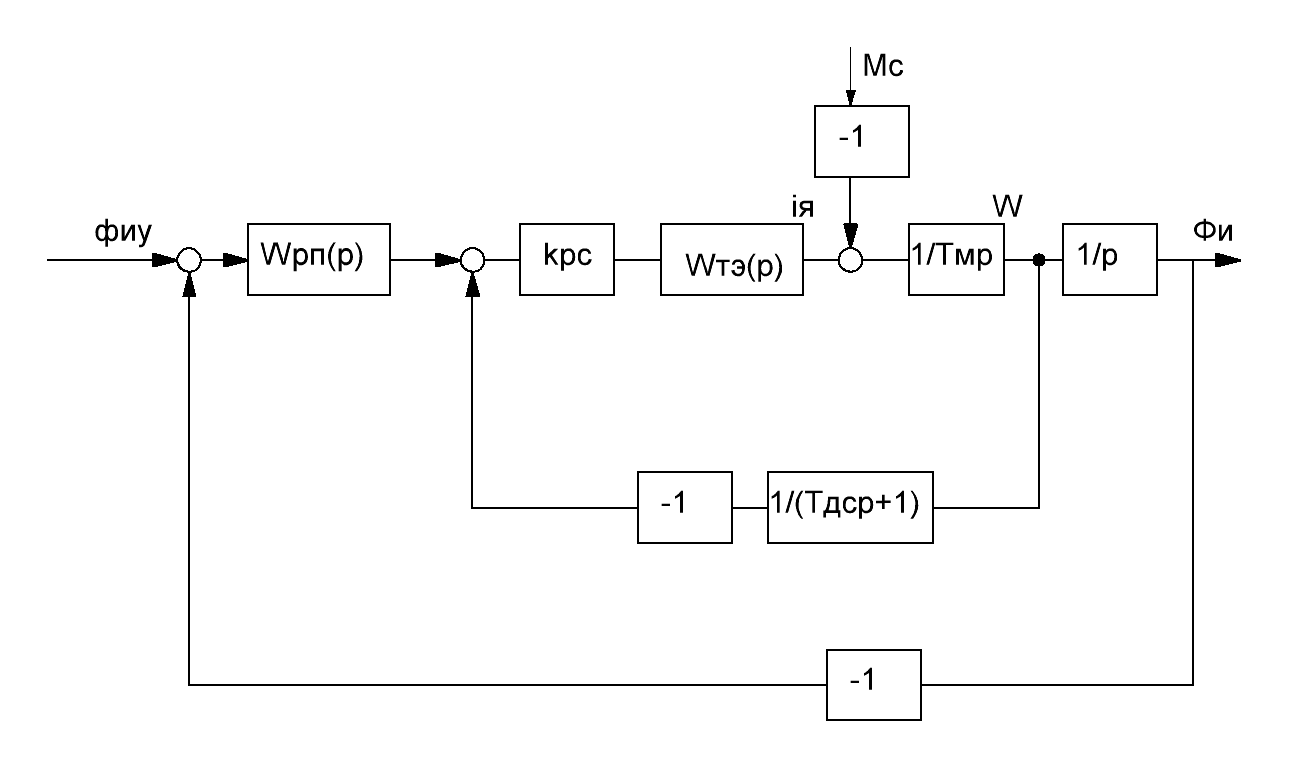
При действии на механизм активного момента нагрузки Мс, заданное положение будет поддерживаться со статической ошибкой.