44. Датчики температуры
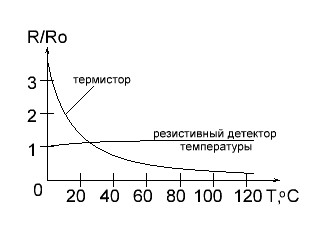
Зависимость свойств от температуры не всегда является недостатком. Из таких материалов изготавливаются датчики температуры. Конструкция выбирается так, чтобы усилить температурную зависимость электрической характеристики. Зависимость обычно нелинейная, что создает трудности при ее воспроизведении. Обычно применяются три типа датчиков температуры: термоэлементы, резистивные датчики температуры, тернисторы.
45. Термоэлементы.
В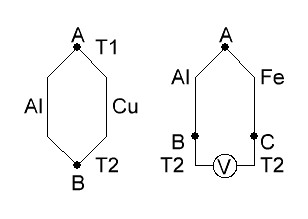 термоэлементе 2
точки А и В соединены двумя проводами,
выполненными из разных материалов
(алюминий, медь). Таким образом создается
замкнутая цепь. Если темпратуры точек
А и В различаются, то по замкнутой цепи
циркулирует ток. На правом рисунке
показана реальная цепь для измерения
этого тока. Точки В и С должны иметь
одинаковую температуру. До тех пор, пока
температура в точках А и В одинаковы
ток в цепи не протекает. Если температуры
в точках А и В отличаются, то по цепи
начинает протекать электрический ток.
Это явление называется термоэлектрическим
эффектом. Это термоэлектродвижущая
сила, которая увеличивается как функция
разности температур. Возникающее
напряжение лежит в пределах нескольких
милливольт. Из-за низкого уровня сигнала
следует тщательно выбирать процедуру
передачи и соединительные провода.
Термоэлемент измеряет разность
температур, а не ее абсолютное значение,
поэтому температура одного из контактов
должна быть известна с высокой точностью.
Для различных темп-х диапазонов
исползуются различные сочетания
материалов. Термоэлементы надежны и
недорогие, имеют малую теплоемкость и
способны работать в широком диапазоне
температур.
термоэлементе 2
точки А и В соединены двумя проводами,
выполненными из разных материалов
(алюминий, медь). Таким образом создается
замкнутая цепь. Если темпратуры точек
А и В различаются, то по замкнутой цепи
циркулирует ток. На правом рисунке
показана реальная цепь для измерения
этого тока. Точки В и С должны иметь
одинаковую температуру. До тех пор, пока
температура в точках А и В одинаковы
ток в цепи не протекает. Если температуры
в точках А и В отличаются, то по цепи
начинает протекать электрический ток.
Это явление называется термоэлектрическим
эффектом. Это термоэлектродвижущая
сила, которая увеличивается как функция
разности температур. Возникающее
напряжение лежит в пределах нескольких
милливольт. Из-за низкого уровня сигнала
следует тщательно выбирать процедуру
передачи и соединительные провода.
Термоэлемент измеряет разность
температур, а не ее абсолютное значение,
поэтому температура одного из контактов
должна быть известна с высокой точностью.
Для различных темп-х диапазонов
исползуются различные сочетания
материалов. Термоэлементы надежны и
недорогие, имеют малую теплоемкость и
способны работать в широком диапазоне
температур.
46. Резистивный детектор температуры.
Металлы имеют положительный температурный коэффициент сопротивления, т. е. с увеличением температуры сопротивление проводника растёт. Это свойство используется в резистивных детекторах температуры, которые обычно выполняются из платиновой проволоки. Сопротивление R является практически линейной функцией температуры T(Co) при опорном значении Tо=0оС. Отношение сопротивления R при температуре T к сопротивлению Rоп при температуре То можно выразить как R/Ro=1+aT+bT2+…, где а – температурный коэффициент сопротивления и b – положительная или отрицательная постоянная. Для платины типичными значениями параметров являются а=0,004оС-1, b=0,59*10-6оС-2. Существуют резистивные детекторы температуры для набора стандартных сопротивлений. Наиболее часто используемый тип имеет 100 Ом при опорной температуре 0оС или 273оК. У него есть собственное имя Pt-100. Датчики резистивные детектора температуры имеют малую чувствительность и любой ток i, используемый для определения изменения сопротивления будет нагревать датчик изменяя его показания на величину, пропорциональную i2. Выходное сопротивление чаще всего измеряется мостовыми схемами.