

40. Резольвер
Резольвер применяется в тех случаях, где требуется очень точное измерение угловых перемещений и скорости, например, в сервосистемах и роботах. Выходной сигнал – мера углового перемещения. Дифференцирование этого сигнала даёт угловую скорость. Он работает на принципе измерения взаимоиндукции между 2-мя обмотками.
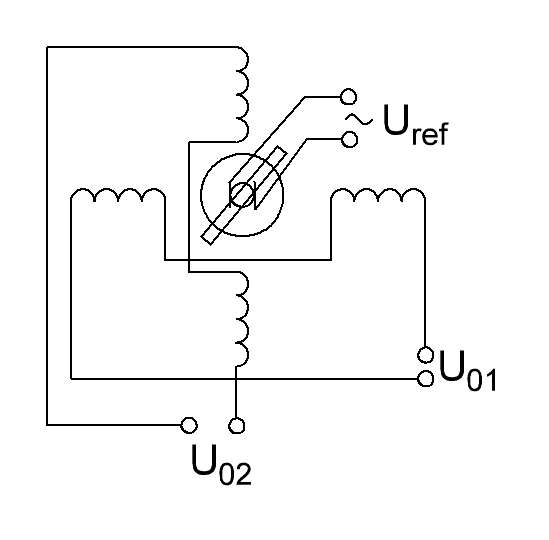 Ротор
резольвера соединён с вращающимся
объектом. На первичную обмотку ротора
подаётся переменное напряжение (Uref).
Статор состоит из двух обмоток, развёрнутых
на 900
друг относительно друга. Напряжение на
этих обмотках:
Ротор
резольвера соединён с вращающимся
объектом. На первичную обмотку ротора
подаётся переменное напряжение (Uref).
Статор состоит из двух обмоток, развёрнутых
на 900
друг относительно друга. Напряжение на
этих обмотках:
где θ – угловое положение ротора. Можно сказать, что выходное напряжение U01 и U02 представляют собой напряжения Uref промодулированное по величине угла θ. Используя одно из выходных напряжений можно измерить углы лишь в диапазоне от 0 до 900. Оба сигнала позволяют однозначно измерять углы от 0 до 3600. Выход резольвера есть тригонометрическая функция угла. Однако эта нелинейность не всегда является недостатком. Например, при управлении вращающими моментами в роботах требуются именно тригонометрические функции углов поворота. Поэтому выходной сигнал резольвера можно непосредственно использовать без доп. Преобразований в реальном времени, которое увеличило бы загрузку управляющего компьютера. Обычно резольвер даёт хорошее разрешение и высокую точность. Он имеет высокий уровень выходного сигнала и низкое выходное сопротивление. Полоса пропускания резольвера зависит от частоты источника напряжения. Проблемы при работе резольвера могут возникать из-за щёток ротора (износ, доп. шумы, мех. нагрузки). Резольверы поставляются в виде полнофункциональных автономных устройств.
41. Датчики силы и момента.
Многие типы датчиков силы/момента основаны на измерении деформации. Датчики для измерения деформации наз. тензодатчиками. Принцип действия таких – это измерение электрического сопротивления в образце, который подвергается воздействию внешних сил (пьезорезистивный эффект). Изменение сопротивления как функции, действующей на датчик силы, зависит от используемого материала. У полупроводникового датчика оно на 1,2 порядка больше, чем у металлического. Чувствительный элемент у полупроводникового датчика выполнен из монокристалла пьезорезистивного материала. Дополнительное преимущество полупроводниковых тензодатчиков – это более высокое удельное сопротивление по сравнению с металлическими и соотв. меньшее потребление мощности и выделение тепла. Измерение моментов и сил необходимо во многих задачах, включая управление точным движением (перемещения и захваты в робототехнике) и передаваемой механической мощностью в двигателях и системах привода. Момент можно измерить либо на основе напряжений, возникающих в материале, либо на основе деформации (прогиба). Измеряя угол скручивания оси датчиком углового перемещения можно определить приложенный момент. Благодаря пьезоэлектрическому эффекту деформированный кварцевый кристалл генерирует разность потенциалов.