

Основная структура системы цифрового управления процессом
Во всех системах имеются общие блоки: сбор данных, управляемые таймером или прерыванием функции, контур обратной связи, обмен данными с другими компьютерами и взаимодействие с оператором.
В общем случае, система цифрового управления физическим/техническим процессом состоит из следующих компонентов:
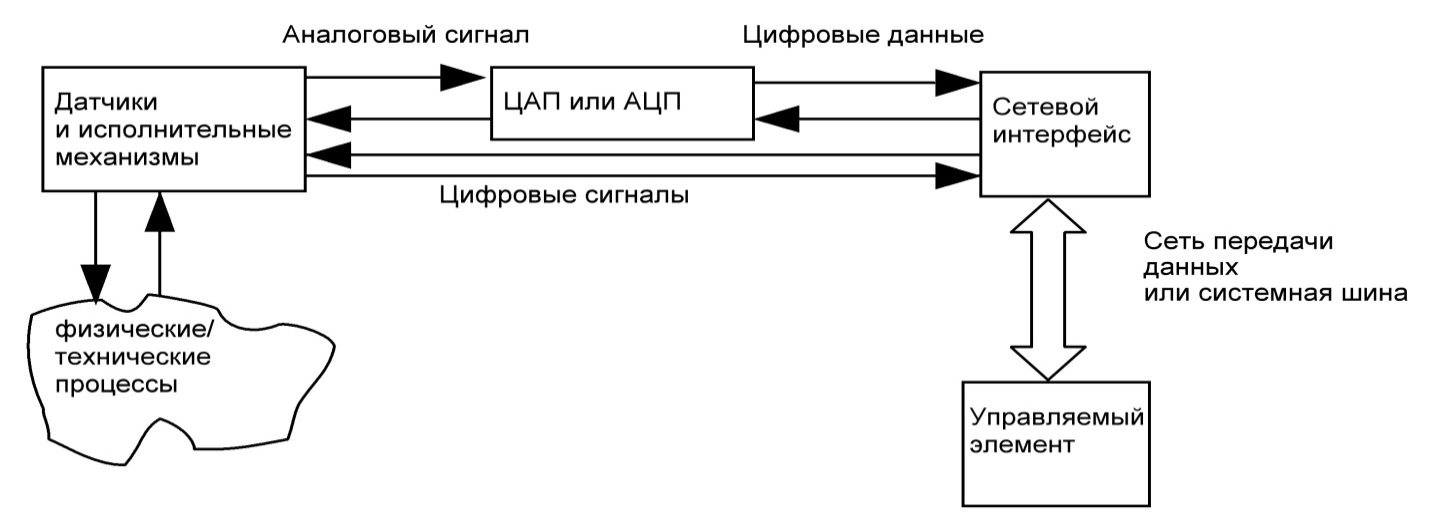
Физический процесс контролируется с помощью датчиков, т.е. устройств преобразующих физические параметры процесса, а именно температура, давление или координаты в электрические величины, а именно сопротивление, ток или разность потенциалов. Непосредственное влияние на процесс осуществляется с помощью исполнительных механизмов. Примерами исполнительных механизмов могут служить серводвигатели, гидроклапаны и пневматические позиционные устройства. Цифровые СУ работают только с информацией представленной в цифровой форме, полученной в результате измерения необходимого преобразования с помощью АЦП.
Информация от удаленных объектов через каналы связи поступают к центральному компьютеру, который:
Интерпретирует поступающие от физического процесса данные;
Вырабатывает решения в соответствие с алгоритмами программ обработки;
Посылает управляемые сигналы;
Обменивается информацией с человеком оператором и реагирует на его команды.
Станки с ЧПУ производят высокоточные механические детали, выполняя строго определённую последовательность операций. Гибкость промышленных роботов и многообразие выполняемых ими операций обеспечивается главным образом компьютерным управлением. Если 1 станок не может обработать деталь, то гибкая производственная система обеспечит выполнение необходимых операций другим станком участка.
Электроэнергетические системы относятся к категории наиболее сложных. Они включают ГЭС, ТЭЦ, АЭС, а также крупные передающие и распределяющие сети. Электрическую энергию нельзя запасти в значительных количествах и поэтому ее приходится производить одномоментно с потреблением. Управление генерацией и передачей электрической энергии должно быть быстрым и точным, чтобы своевременно выявить и удовлетворить увеличивающие нагрузки, задействуя либо имеющиеся свободную генерированную мощность, либо мощность других энергосистем.
Управление процессом в реальном времени
Основная разность компьютера, управляющего процессом от обычного, что он должен работать со скоростью соответствующей скорости процесса.
Само
понятие реального времени указывает
на то, что в реакции компьютерной системы
на внешнее событие не должно быть
заметного запаздывания.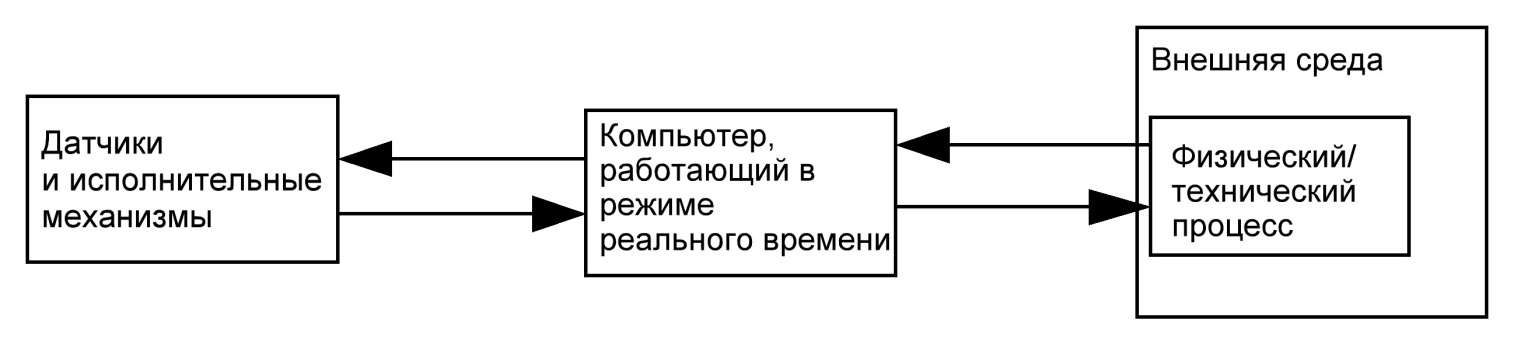
Другая главная особенность компьютерного управления процессом заключается в том, что ход исполнения программы нельзя определить заранее. Внешние сигналы могуть прерываться или изменяться последующие оператором программы, причем для каждого нового прогона по-разному. Дополнительную проблему представляет тестирование систем реального времени из-за отсутствия предсказанного порядка выполнения оператором программы по сравнению с обычными компьютерными системами.
Все физические процессы можно представить в виде множества подпроцессов, которые протекают параллельно. Естественным следствием параллельной природы физических процессов является то, что компьютер должен уметь управлять параллельными задачами.