

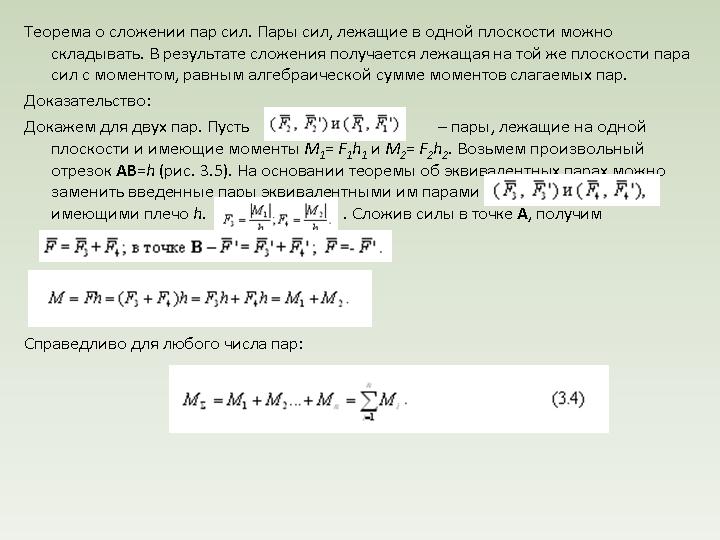
11) Сложение пар сил. Условия и уравнения равновесия системы пар сил
12)произвольная система сил . главный вектор и главный момент силы. Методы определения.
Главный вектор и главный момент плоской системы сил
Рассмотрим плоскую систему сил (F1, F2, ..., Fn),действующих на твердое тело в координатной плоскости Oxy.
Главным вектором системы сил называется вектор R, равный векторной сумме этих сил:
R = F1 + F2 + ... + Fn = Fi.
Для плоской системы сил ее главный вектор лежит в плоскости действия этих сил.
Главным моментом системы сил относительно центра O называется вектор LO, равный сумме векторных моментов этих сил относительно точки О:
LO = MO(F1) + MO(F2) + ... + MO(Fn) = MO(Fi).
Вектор R не зависит от выбора центра О, а вектор LO при изменении положения центра О может в общем случае изменяться.
Для плоской системы сил вместо векторного главного момента используют понятие алгебраического главного момента. Алгебраическим главным моментом LO плоской системы сил относительно центра О, лежащего в плоскости действия сил, называют сумму алгебраических моментов этих сил относительно центра О.
Главный вектор и главный момент плоской системы сил обычно вычисляется аналитическими методами.
Методы:
В аналитическом методе для вычисления главного вектора и главного момента используются проекции сил Fix, Fiy и координаты xi, yi точек их приложения.
Модуль R главного вектора плоской системы сил и его направляющие косинусы ex, eу вычисляются по следующим формулам:
R = (Rх + Ry) ; ex = Rx / R; ey = Rу / R; Rx = Fix; Ry = Fiy.
Здесь в суммировании проекций можно не включать силы, образующие пары сил (Fk, F'k), Fk = -F'k, поскольку суммы проекций таких двух сил на любую ось равны нулю.
Алгебраический главный момент LO плоской системы сил относительно центра O ( начала координатных осей ) вычисляется по формуле:
LO = (xi Fiy - yi Fix) + Mk.
Здесь во вторую сумму выделены алгебраические моменты Mk пар сил (Fk, F'k).
В случаях, когда плечи hi всех сил определяются достатосно просто ( например, если силы параллельны координатным осям Ox и Oy ), величина LO может быть вычислена по формуле:
LO = ± Fi hi + Mk.
13)Лемма о параллельном переносе силы.
Докажем лемму: Сила, приложенная в какой-либо точке твердого тела, эквивалентна такой же силе, приложенной в любой другой точке этого тела, и паре сил, момент которой равен моменту данной силы относительно новой точки приложения. Пусть в точке А твердого тела приложена сила F (рис. 4.1). Приложим теперь в точке В тела систему двух сил F' и F²-, эквивалентную нулю, причем выбираем F'=F (следовательно, F"=–F). Тогда сила F~(F, F', F"), так как (F',F")~0. Но, с другой стороны, система сил (F, F', F") эквивалентна силе F' и паре сил (F, F"); следовательно, сила F эквивалентна силе F' и паре сил (F, F"). Момент пары (F, F") равен M=M(F,F")=BAxF, т.е. равен моменту силы F относительно точки В M=MB(F). Таким образом, лемма о параллельном переносе силы доказана.
14)Приведение произвольной системы сил к данному центру
Приведение плоской системы сил к центру
Теорема о приведении системы сил:
Любая система сил, действующих на абсолютно твердое тело, может быть заменена одной силой R, равной главному вектору этой системы сил и приложенной к произвольно выбранному центру О, и одной парой сил с моментом LO, равным главному моменту системы сил относительно центра О.
Такая эквивалентная замена данной системы сил силой R и парой сил с моментом LO называют приведением системы сил к центу О.
Рассмотрим здесь частный случай приведения плоской системы сил к центру О, лежащему в той же плоскости. В этом случае система сил заменяется одной силой и одной парой сил, лежащих в плоскости действия сил системы. Момент этой пары сил можно рассматривать как алгебраическую величину LO и изображать на рисунках дуговой стрелкой ( алгебраический главный момент плоской системы сил ).
В результате приведения плоской системы сил к центру возможны следующие случаи:
если R = 0, LO = 0, то заданная система является равновесной;
если хотя бы одна из величин R или LO не равна нулю, то система сил не находится в равновесии.
При этом:
Eсли R = 0 и LO 0, то система сил приводится к одной паре сил с моментом LO, причем в этом случае величина момента LO не зависит от выбора центра О.
Eсли R не равен 0, то при любом значении LO система сил приводится к равнодействующей силе.
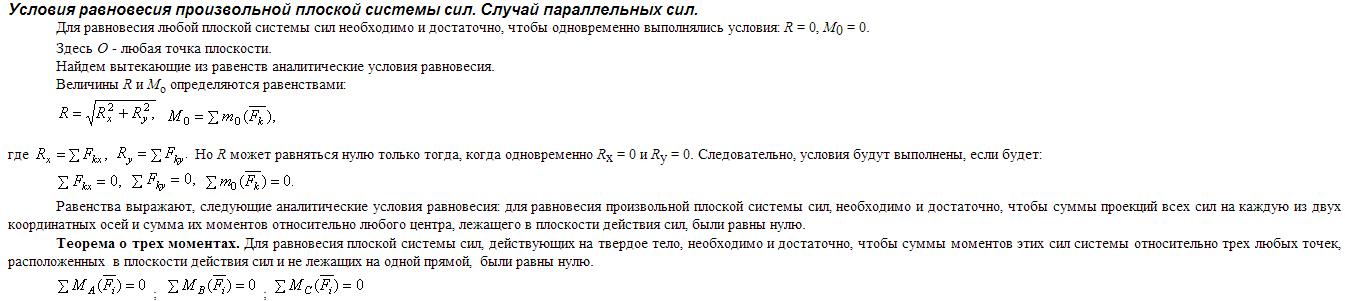
15) Условия и уравнения равновесия произвольной плоской системы сил
Необходимым и достаточным условием равновесия системы сил является равенство нулю главного вектора и главного момента. Для плоской системы сил эти условия получают вид Fo=åFk=0, МОz=åМoz(Fk)=0, (5.15), где О– произвольная точка в плоскости действия сил. Получим: Fox=åFkx=F1x+F2x+…+Fnx=0, Pox=åFky=F1y+F2y+…+Fny=0, МОz=åMOz(Fk)=Moz(F1)+Moz(F2)+…+Moz(Fn)=0, т. е. для равновесия плоской системы сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на две координатные оси и алгебраическая сумма моментов всех сил относительно произвольной точки равнялись нулю. Второй формой уравнения равновесия является равенство нулю алгебраических сумм моментов всех сил относительно любых трех точек, не лежащих на одной прямой; åMAz(Fk)=0, åMBz(Fk)=0, åMCz(Fk)=0, (5.17), где A, В и С– указанные точки. Необходимость выполнения этих равенств вытекает из условий (5.15). Докажем их достаточность. Предположим, что все равенства (5.17) выполняются. Равенство нулю главного момента при центре приведения в точке А возможно, либо если система приводится к равнодействующей (R≠0) и линия ее действия проходит через точку А, либо R=0; аналогично равенство нулю главного момента относительно точек В и С означает, что либо R≠0 и равнодействующая проходит через обе точки, либо R=0. Но равнодействующая не может проходить через все эти три точки А, В и С (по условию они не лежат на одной прямой). Следовательно, равенства (5.17) возможны лишь при R=0, т. е. система сил находится в равновесии. Заметим, что если точки А, В и С лежат на одной прямой, то выполнение условий (5.17) не будет достаточным условием равновесия, — в этом случае система может быть приведена к равнодействующей, линия действия которой проходит через эти точки.
16) такойже как и 11 ответ)
17) Внешняя сила — это мера взаимодействия между телами. В задачах сопротивления материалов внешние силы считаются всегда заданными. К внешним силам относятся также реакции опор (связей). Внутренняя сила — силы взаимодействия между частями одного тела, возникающие под действием внешних сил.
Внутренние силы являются самоуравновешенными, поэтому они не видны и не влияют на равновесие тела. Определяют внутренние силы методом сечения. Замкнутая система тел в механике — совокупность физических тел, у которых взаимодействия с внешними телами отсутствуют. Более строго: система называется замкнутой, если существует замкнутая финитная оболочка, содержащая эту систему, такая, что любое граничное условие на оболочке равно нулю. Замкнутые системы в широком смысле этого термина играют фундаментальную роль в изучении законов природы, т. к. по сути обозначают чистоту эксперимента, свободного от привнесённых факторов. В этом заключается их отличие от незамкнутых систем, которые подвержены произволу внешнего воздействия и потому не могут дать сведений о законах своей природы. Статическая система называется статически определимой, если число опорных реакций соответствует числу степеней свободы, и величины опорных реакций по принципу механического равновесия можно определить из величин внешних нагрузок.
Все другие системы называются статически неопределимыми.
Для расчёта всех статически определимых систем достаточно решать уравнения равновесия:
Для плоских задач есть три условия равновесия. Сумма всех вертикальных сил, всех горизонтальных сил и всех моментов должна быть равна нулю. Σ V=0, Σ H=0, Σ M=0.
Для пространственных задач есть шесть условий. Σ X=0, Σ Y=0, Σ Z=0, Σ Mx=0, Σ My=0, Σ Mz=0.
Осадка опор, температурные воздействия и неточности сборки в статически определимых системах не влияют на распределение и величину усилий.
18) Трение скольжения — сила, возникающая при поступательном перемещении одного из контактирующих/взаимодействующих тел относительно другого и действующая на это тело в направлении, противоположном направлению скольжения. Трение в механизмах и машинах
В большинстве традиционных механизмов (ДВС, автомобили, зубчатые шестерни и пр.) трение играет отрицательную роль, уменьшая КПД механизма. Для уменьшения силы трения используются различные натуральные и синтетические масла и смазки. В современных механизмах для этой цели используется также напыление покрытий (тонких плёнок) на детали. С миниатюризацией механизмов и созданием микроэлектромеханических систем (МЭМС) и наноэлектромеханических систем (НЭМС) величина трения по сравнению с действующими в механизме силами увеличивается и становится весьма значительной , и при этом не может быть уменьшена с помощью обычных смазок, что вызывает значительный теоретический и практический интерес инженеров и учёных к данной области. Для решения проблемы трения создаются новые методы его снижения в рамках трибологии и науки о поверхности (англ.).