

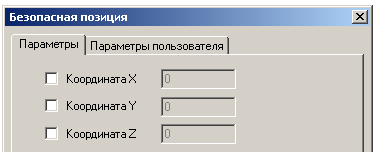
Технологическая команда «Безопасная позиция»
Безопасная позиция - это точка или плоскость, куда отводится инструмент перед сменой, перед поворотом детали в рабочем пространстве станка, перед сменой стола спутника, а также по команде ОТВОД.
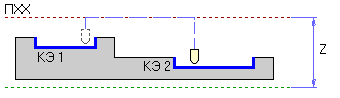
Технологическая команда «Плоскость холостых ходов»
Плоскость холостых ходов (ПХХ) - это плоскость, по которой выполняются холостые перемещения инструмента при переходе от одного конструктивного элемента к другому. Перемещение на холостом ходу через действующую ПХХ формируется следующим образом:
|
по кратчайшему расстоянию из конечной точки обработки в ПХХ; |
|
по кратчайшему расстоянию в новую точку на ПХХ; |
|
по кратчайшему расстоянию из ПХХ в начальную точку обработки следующего КЭ. |
|
|
|
Если в станке не реализовано перемещение на холостом ходу по двум координатам одновременно, система автоматически разобьет данное перемещение на два. |
|
Если ПХХ не задана, инструмент будет перемещаться на холостом ходу от одного конструктивного элемента к другому по кратчайшему расстоянию. |
|
При смене инструмента происходит автоматическое отключение установленной плоскости холостых ходов. |
Параметры плоскости холостых ходов

Модальная команда. Чтобы ПХХ действовала на всех переходах до ее отмены или переопределения, необходимо установить флажок Модальная команда. Если такой флажок не установлен, то ПХХ будет действовать только до первого перехода. вкл./выкл. Чтобы задать положение плоскости холостых ходов, поставьте флажок вкл./выкл. . Если флажок не установлен, то плоскость холостых ходов считается выключенной. В этом случае, инструмент будет перемещаться на холостом ходу от одного КЭ к другому по кратчайшему расстоянию. параллельно плоскости XY. Плоскость холостых ходов располагается параллельно плоскости XY на заданной Z координате. параллельно плоскости XZ. Плоскость холостых ходов располагается параллельно плоскости XZ на заданной Y координате. параллельно плоскости YZ. Плоскость холостых ходов располагается параллельно плоскости YZ на заданной X координате. Координата Z. Высота плоскости холостых ходов.
|
Технологические команды “Стоп” и “Останов”
Команда Стоп программно останавливает работу станка. При этом происходит выключение шпинделя и СОЖ. Для продолжения работы необходимо вмешательство оператора. При продолжении работы функции шпинделя и СОЖ восстанавливаются.
Команда Останов отличается от команды Стоп тем, что она отрабатывается в зависимости от положения специального переключателя на пульте УЧПУ.
Команды Стоп и Останов могут быть заданы только для тех станков, у которых реализованы данные функции.
Технологическая команда «Отвод»
При выполнении команды Отвод система формирует в УП последовательность команд перемещения инструмента из текущего положения в безопасную позицию.