

Чтобы временно исключить технологический объект:
Сделайте текущим технологический объект, который Вы хотите временно исключить из маршрута. Чтобы получить дополнительные сведения о выборе текущего технологического объекта, смотрите раздел «Активизация технологического объекта».
Нажмите кнопку «Исключить»
 на панели инструментов «Управление
Технологическими Объектами».
на панели инструментов «Управление
Технологическими Объектами».
7 – Процессор

1 2 3 4 5 6
1 – Процессор (расчет последовательности технологических команд обработки заданных технологических объектов); 2 – Выполнить текущий ТО (расчет последовательности технологических команд обработки текущих технологических объектов); 3 – Адаптер (преобразование расчетной траектории движения инструмента в УП для конкретной модели станка с ЧПУ); 4 – Процессор + Адаптер (запуск процессора и адаптера друг ха другом); 5 – Редактор CL DATA; 6 – Пакетный режим.
Управляющая программа (УП) - последовательность команд для определенного вида оборудования. Перед генерацией управляющей программы необходимо рассчитать траекторию движения инструмента и выбрать конкретный вид оборудования (модель станка). Команды по расчету траектории движения инструмента (файл CLDATA) расположены на панели “Процессор”:
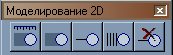
8 – Моделирование 2D (плоское)
1 2 3 4 5
1 – Полное моделирование обработки с выводом координат текущего положения инструмента; 2 – Моделирование обработки с выводом в информационной строке координат инструмента в конечной точке текущего элемента; – Показать траекторию (отображение траектории движения настроечной точки инструмента); 4 – пошаговое моделирование обработки с выводом в информационной строке координат текущего положения инструмента; 5 – погасить траекторию движения настроечной точки инструмента.
Команда «Полное моделирование» используется для моделирования обработки с отображением в строке состояния координат текущего положения инструмента и параметров инструмента (подача, скорость вращения шпинделя, СОЖ).
Команда «Моделирование» используется для моделирования обработки с отображением в строке состояния координат инструмента в конечной точке текущего элемента CLDATA и параметров инструмента.
Команда
«Пошаговое
моделирование»
![]() (панель «Моделирование 2D»)
используется для моделирования обработки
с отображением в строке состояния
координат текущего положения инструмента
и параметров инструмента (подача,
скорость вращения шпинделя, СОЖ). При
этом инструмент останавливается в
каждой конечной точке текущего элемента
CL DATA. Для продолжения моделирования
нажмите любую клавишу на клавиатуре
или левую кнопку мыши.
(панель «Моделирование 2D»)
используется для моделирования обработки
с отображением в строке состояния
координат текущего положения инструмента
и параметров инструмента (подача,
скорость вращения шпинделя, СОЖ). При
этом инструмент останавливается в
каждой конечной точке текущего элемента
CL DATA. Для продолжения моделирования
нажмите любую клавишу на клавиатуре
или левую кнопку мыши.
9 – Моделирование 3D (объемное)

Для объемного отображения траектории движения инструмента и моделирования обработки Вы можете использовать модуль ADEM Verify, который включается панелью ”Объемное моделирование”. Конечным результатом моделирования обработки будет твердотельная тонированная модель.
10 – Постпроцессор

1 2 3
1 - «Просмотр CLDATA»; 2 – «Просмотр управляющей программы»; 3 - «Время и длина».
После преобразования файла CLDATA в управляющую программу можно просмотреть текст УП с помощью команд, расположенных на панели «Постпроцессор»:
При
выполнении команды «Адаптер» на панели
«Процессор» вычисляется время обработки
для определенного вида оборудования и
длина управляющей программы в метрах
перфоленты. Для просмотра этих параметров
нажмите кнопку «Время и длина»
![]() на панели «Постпроцессор» появится
диалог «Параметры» с временем обработки
и длиной УП.
на панели «Постпроцессор» появится
диалог «Параметры» с временем обработки
и длиной УП.
11 – САМ информация
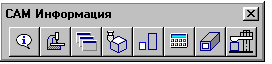
1 2 3 4 5 6 7 8
1 – Информация (информация об имени программы и детали); 2 – Станок (информация о типе и модели оборудования, для которого формируется УП); 3 – Проект (управление проектами: создание нового проекта; копирование, удаление выбранного объекта); 4 – Зона (создание, удаление и изменение параметров зоны); 5 – Масштаб (задание значения пользователем масштаба); 6 – Калькулятор; 7 – Заготовка (задание материала заготовки); 8 – Прижим (задание параметров прижима).
12 – Команды

1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
1 – инструмент (назначение и корректировка инструмента); 2 – начало цикла (определение начала цикла в ПСК); 3 – безопасная позиция (задание безопасной позиции); 4 – плоскость холостых ходов; 5 – перезахват (задание перезахвата для прессов с ЧПУ); 6 – стоп (осуществление программного останова станка и УП с выключением шпинделя); 7 – останов (осуществление программного останова станка и УП без выключения шпинделя); 8 – отвод (перемещение инструмента из текущего положения в безопасную позицию); 9 – аппроксимация (задание максимального значения погрешности при аппроксимации кривой); 10 – поворот (поворот оси шпинделя вокруг 1, 2, 3-х осей вращения текущей системы координат); 11 – комментарий (создание комментария); 12- вызов программы (выполнение программы); 13 – вызов цикла (выполнение цикла в заданной точке); 14 – команда пользователя (произвольная технологическая команда, параметры которой определяются пользователем); 15 – Ручной ввод (ручной ввод CL DATA); 16 – Контрольная точка.
Технологические команды расположены на панели “Команды”. Технологическая команда может быть задана в любой момент проектирования обработки.
13 – Настройка

Настройка диалогов, меню выбора и организации доступа к таблицам базы данных;
14 – Камера САМ
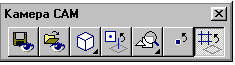
1 2 3 4 5 6 7
1 –Сохранить текущий вид; 2 – Восстановить текущий вид; 3 – Изометрический вид;
4 – вид на грани (ориентация вида относительно выбранной грани); 5 – Показать все (размеры окна в соответствии с размерами созданных элементов); 6 – Центр вращения;
7 – Вид на рабочую плоскость (параллельно экрану).
15 – Рабочая плоскость САМ
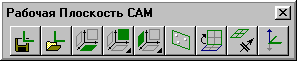
1 2 3 4 5 6 7 8 9
1 – Сохранить систему координат; 2 – Восстановить систему координат (восстановление рабочей плоскости и системы координат); 3 – Абсолютная рабочая плоскость XY; 4 – Абсолютная рабочая плоскость XZ;
5 – Абсолютная рабочая плоскость YZ; 6 –Рабочая плоскость по трем точкам; 7 – Разворот рабочей плоскости (на 90относительно осей X, Y, Z); 8 – Совмещение системы координат с выбранным положением; 9 – Направление оси Z (смена на противоположное).
16 – Режимы получения координат САМ

2
1 – Плоский режим (в рабочей плоскости); 2 – Пространственный режим.
17 – Режимы отображения САМ
1 2 3 4 5
1 – Режим отображения (для трехмерной модели); 2 – Сделать невидимым (выделенные объекты); 3 – Сделать видимым все; 4 – Отключение изображения (части модели над рабочей плоскостью); 5 – Переключение видимости (показать только 2D, только 3D или все).
18 – Режимы САМ.
1 2 3
1– Автоматическая привязка; 2 – Фильтр автоматической привязки; 3 – Управление слоями (список слоев).