

61) Принцип работы бортового радиоэлектронного комплекса истребителя-перехватчика на этапе бортового наведения.
Этап бортового наведения самолета на цель начинается момента обнаружения цели бортовой РЛС.
На этом этапе в работу включается бортовой радиоэлектронный комплекс управления истребителем-перехватчиком.
Информация о цели формируется с помощью бортовой радиолокационной станции и других датчиков.
Обработка поступающих данных производится бортовой ЭВМ, которая работает во всех режимах: навигации, наведения с земли, самонаведения при сближении с целью и, при атаке цели с применением бортового оружия (управляемых ракет, пушек).
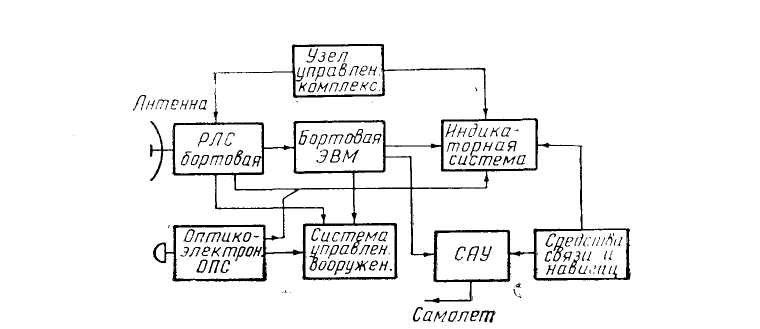
На рисунке приведена упрощенная структурная схема возможного радиоэлектронного комплекса управления истребителем-перехватчиком.
Рисунок. Структурная схема возможного радиоэлектронного комплекса
управления истребителя-перехватчика
Основным источником информации данного комплекса является бортовая РЛС, обеспечивающая решение главных задач на этапе бортового наведения, прицеливания и пуска ракет.
Бортовая ЭВМ решает задачи сближения с целью (самонаведение) с использованием одноного из методов наведения (метод погони, пропорциональной навигации).
На индикаторах отображается воздушная обстановка и выдаются команды управления.
62) Назначение рлс перехвата и прицеливания истребителя-перехватчика.
Для получения информации о воздушной обстановке в передней полусфере истребителя и о наземных целях, на нем устанавливается обзорно-прицельная система (ОПС), основным элементом которой является бортовая РЛС (БРЛС) перехвата и прицеливания.
После вывода ЛА с помощью наземных РЛС в район нахождения цели БРЛС перехвата и прицеливания обеспечивает решение следующих задач:
Обнаружение и опознавание (совместно с системой опознавания) обнаруженной цели;
Измерение координат и параметров обнаруженной воздушной цели;
Облучение (подсвет) цели, создание условий для наведения на нее УР с радиолокационной РГС;
Самолетовождение (решение задач навигации) при возращении на аэродром и уничтожение малоразмерных наземных целей;
Предупреждения летчика о моменте выхода из атаки.
Радиолокационная станция перехвата и прицеливания отличается от обычной РЛС обнаружения тем, что наряду с узлами, обеспечивающими обзор и обнаружение цели, имеет устройства, обеспечивающие автоматическое и непрерывное сопровождение атакуемой цели по дальности и угловым координатам.
Порядок функционирования РЛС зависит от вида решаемой задачи и способа боевых действий истребителя.
Так при решении задач навигации БРЛС переводится в режим обзора земной поверхности и на экране системы индикации отображается радиолокационное изображение местности впереди самолета в некотором секторе.
По отметкам радиоориентиров на экране, местоположение которых заранее известно, определяются координаты самолета.
Данный режим работы РЛС также используется при обнаружении и уничтожении малоразмерных наземных целей.
При перехвате воздушных целей сначала обеспечивается дальнее наведение истребителей по командам с командного пункта, а затем, после обнаружения цели и захвата её на автосопровождение бортовой РЛС, – ближнее наведение, прицеливание и применение оружия.

Рисунок. Структурная схема бортовой РЛС перехвата и прицеливания.