

48. Принцип измерения азимута на борту ла с использованием рсбн.
О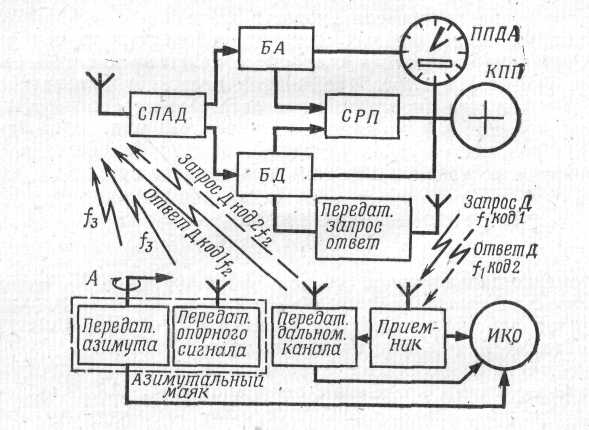 твет:
Измерение
азимута на борту летательного аппарата
производится
путем приема сигналов азимутального
радиомаяка из состава
азимутально-дальномерного радиомаяка.
Азимутальный
маяк включает:
передатчик опорного сигнала и передатчик
азимутального сигнала.
твет:
Измерение
азимута на борту летательного аппарата
производится
путем приема сигналов азимутального
радиомаяка из состава
азимутально-дальномерного радиомаяка.
Азимутальный
маяк включает:
передатчик опорного сигнала и передатчик
азимутального сигнала.
Рис. 2. Упрощенная структурная схема угломерно-дальномерной системы
Передатчики
азимутального маяка формируют сигналы
на частоте
 .
Передатчик азимутального сигнала
работает
в непрерывном режиме, имеет направленную
антенну (с
узкой диаграммой направленности в
горизонтальной плоскости), которая
вращается с постоянной угловой скоростью
.
Передатчик азимутального сигнала
работает
в непрерывном режиме, имеет направленную
антенну (с
узкой диаграммой направленности в
горизонтальной плоскости), которая
вращается с постоянной угловой скоростью
 .
В момент прохождения
направленной антенной северного
направления с помощью
другого передатчика, имеющего
всенаправленную антенну,
излучается опорный сигнал (сигнал начала
отсчета). Этот сигнал принимается
бортовыми устройствами ЛА, находящегося
в зоне действия системы. Кроме того на
ЛА, в момент облучения его ДНА направленной
антенны, будет принят
и азимутальный
сигнал.Время
между сигналом начала отсчета и
азимутальным сигналом будет
пропорционально азимуту летательного
аппарата, так как
.
В момент прохождения
направленной антенной северного
направления с помощью
другого передатчика, имеющего
всенаправленную антенну,
излучается опорный сигнал (сигнал начала
отсчета). Этот сигнал принимается
бортовыми устройствами ЛА, находящегося
в зоне действия системы. Кроме того на
ЛА, в момент облучения его ДНА направленной
антенны, будет принят
и азимутальный
сигнал.Время
между сигналом начала отсчета и
азимутальным сигналом будет
пропорционально азимуту летательного
аппарата, так как
 .
По измеренному времени запаздывания
.
По измеренному времени запаздывания
 при известной постоянной скорости
вращения антенны
,
можно определить α. При этом отсчет
дальности до наземных средств как и
азимута летательного аппарата производится
по ППДА, имеющего счетчик дальности и
стрелочный индикатор азимута.
при известной постоянной скорости
вращения антенны
,
можно определить α. При этом отсчет
дальности до наземных средств как и
азимута летательного аппарата производится
по ППДА, имеющего счетчик дальности и
стрелочный индикатор азимута.
49. Принцип измерения дальности на борту ла с использованием рсбн.
Ответ:
Определение
дальности на летательном аппарате
производится на
основе измерения времени запаздывания
ответного сигнала по
сравнению с запросным сигналом. Бортовой
передатчик излучает на частоте
 кодированные импульсы запроса (запросный
сигнал), которые принимаются
наземным приемником. Запросный сигнал
дешифрируется, и
запускает шифратор передатчика
дальномерного канала. Наземный
передатчик излучает ответные импульсы
с тем же кодом (№
1), но уже по другому каналу, на частоте
кодированные импульсы запроса (запросный
сигнал), которые принимаются
наземным приемником. Запросный сигнал
дешифрируется, и
запускает шифратор передатчика
дальномерного канала. Наземный
передатчик излучает ответные импульсы
с тем же кодом (№
1), но уже по другому каналу, на частоте
 .
Бортовой приемник СПАД (самолетный
приемник азимута - дальности), принимая
эти
ответные сигналы, дешифрирует их и
направляет в блок измерения
дальности (БД), выход которого подключен
к индикаторному
прибору ППДА.
.
Бортовой приемник СПАД (самолетный
приемник азимута - дальности), принимая
эти
ответные сигналы, дешифрирует их и
направляет в блок измерения
дальности (БД), выход которого подключен
к индикаторному
прибору ППДА.
50. Назначение рсдн.
Ответ: Радиотехнические системы дальней навигации относятся к разностно-дальномерным РНС и предназначены для определения местоположения ЛА, находящихся на больших удалениях от наземных радиомаяков.
Разностно-дальномерные радионавигационные системы позволяют измерять при помощи радиоволн разности расстояний от подвижных объектов до неподвижных наземных точек. По измеренной разности расстояний определяется линия положения, обладающая свойством постоянства разности расстояний до двух заданных точек. Линии положения для различных значений разностей расстояний наносятся заранее на карты и затем используются при решении навигационных задач.
51.Принцип определения местоположения ла в рсдн.
Ответ:
На
земной поверхности в двух различных
пунктах с известными
координатами устанавливаются синхронно
работающие передающие радиостанции А
и
Б
(рис.
3). Станция А
такой
пары является ведущей, а станция Б
-
ведомой. Ведущая
станция А
периодически
излучает короткие импульсные
радиосигналы, которые принимаются на
ведомой станции
Б и на борту летательного аппарата,
расположенного в произвольной
точке М.
Сигналы
ведущей станции достигают ведомую
станцию спустя
время
 ,
где d=АБ
-
расстояние между станциями А
и
Б,
называемое
базой системы.
,
где d=АБ
-
расстояние между станциями А
и
Б,
называемое
базой системы.
Р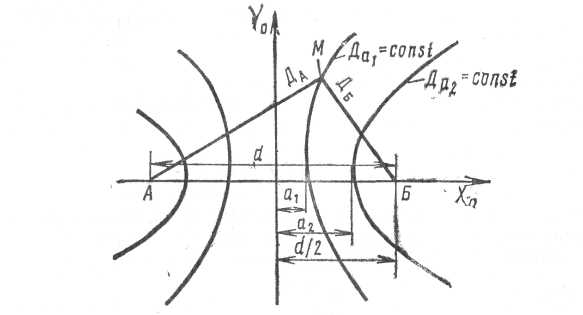 ис.
3. Линии положения разностно-дальномерных
систем
ис.
3. Линии положения разностно-дальномерных
систем
Ведомая
станция после приема сигналов от ведущей
станции
излучает свои импульсные сигналы с
фиксированной кодовой
задержкой. Общая задержка сигналов
ведомой станции относительно
сигналов ведущей станции
 .
Таким
образом,
обеспечивается синхронность работы
ведущей и ведомой станций.
Передатчики
обеих станций
излучают импульсы одинаковой формы
и равной длительности на общей несущей
частоте. Частота
повторения этих импульсов поддерживается
постоянной. На
подвижном объекте с
помощью специального приемно-индикаторного
устройства осуществляется прием
импульсных сигналов
ведущей станции и производится измерение
временного
интервала между ними по формуле
.
Таким
образом,
обеспечивается синхронность работы
ведущей и ведомой станций.
Передатчики
обеих станций
излучают импульсы одинаковой формы
и равной длительности на общей несущей
частоте. Частота
повторения этих импульсов поддерживается
постоянной. На
подвижном объекте с
помощью специального приемно-индикаторного
устройства осуществляется прием
импульсных сигналов
ведущей станции и производится измерение
временного
интервала между ними по формуле
 .
Измеренному
временному интервалу соответствует
вполне определенная
разность расстояний от подвижного
объекта до станций
А
и
Б:
.
Измеренному
временному интервалу соответствует
вполне определенная
разность расстояний от подвижного
объекта до станций
А
и
Б:
 .
.
Линии положения разностно-дальномерных систем, соответствующие измеренным временным интервалам между импульсами ведущей и ведомой станций, можно представлять в виде плоских гипербол при навигации на расстояния до 1000 км. При больших расстояниях Землю считают шаром и линии положения изображают в виде сферических гипербол.
Разностно-дальномерная система, состоящая из пары станций, позволяет определять всего одну линию положения летательного аппарата. Для определения места летательного аппарата необходима вторая пара станций, расположенная таким образом, чтобы ее линии положения пересекались с линиями первой пары станций (рис. 4).
Рис. 4. К объяснению принципа работы РСДН
П осле
измерения временных интервалов для
двух пар наземных
станций по
карте определяется местоположение
летательного
аппарата в точке пересечения двух
гиперболических линий
положения.
осле
измерения временных интервалов для
двух пар наземных
станций по
карте определяется местоположение
летательного
аппарата в точке пересечения двух
гиперболических линий
положения.