

44. Назначение и принцип действия радиовысотомера больших высот.
РВ больших высот предназначены для измерения высот в диапазоне 500 – 25000 м.
РВ больших высот в качестве зондирующих сигналов используют последовательность радиоимпульсов.
Структурная схема РВ больших высот представлена на рис. 7. Передатчик запускается синхронизирующими импульсами задающего генератора. Зондирующие сигналы излучаются передающей антенной. Отраженные сигналы улавливаются приемной антенной, усиливаются, детектируются в приемнике и поступают в блок сопровождения (системы АСД).
Принцип работы РВ больших высот:
В режиме «Поиск».
В этом режиме генератор тактовых импульсов запускает в работу ЗГ. Передатчик формирует зондирующие импульсы, передающая антенна излучает их в пространство.
Одновременно с этим, на счетчик импульсов с генератора тактовых импульсов подаются счетные импульсы.
Рис. 7. Обобщенная структурная схема РВ больших высот
Кроме
того, задающий генератор формирует
следящий
строб
с изменяющимся временем запаздывания
 ,
который поступает в блок сопровождения.
,
который поступает в блок сопровождения.
В режиме «Измерение».
После излучения зондирующих импульсов в пространство и восстановления чувствительности приемника, радиовысотомер переходит в режим автоматического сопровождения принятого сигнала.
В момент прихода отраженного сигнала:
1. в блоке сопровождения происходит совпадение по времени следящего строба и отраженного от земной поверхности импульса (при этом в блоке формируется управляющий сигнал и передается на счетчик);
2. по сигналу с блока сопровождения счетчик импульсов выключается.
С выхода счетчика сигнал в двоичном коде (в нем содержится информация о высоте полета ЛА) передается на БЦВМ и в ЦАП.
С ЦАП измеренная высота в виде постоянного напряжения поступает на стрелочный индикатор высоты.
45. Назначение и принцип работы автоматического радиокомпаса по упрощенной структурной схеме.
Автоматические радиокомпасы (АРК) являются угломерными РНС.
АРК предназначены для автоматического определения направления (пеленга) на работающую приводную радиостанцию, т.е. используются для определения курсового угла этой радиостанции.
АРК предназначен для решения следующих задач:
- определения местонахождения ЛА (при одновременном пеленговании двух наземных радиостанций с известными координатами);
- обеспечения полета ЛА на радиостанцию и от нее с визуальной индикацией курсового угла;
- обеспечения захода ЛА на посадку;
- организации односторонней телефонной радиосвязи ЛА с землей (АРК выполняет роль резервного радиоприемника).
Принцип действия АРК основан на направленном радиоприеме излучения приводной радиостанции, который реализуется за счет использования ДНА специальной формы (форма кардиоиды).
Структурная схема АРК представлена на рис. 8.
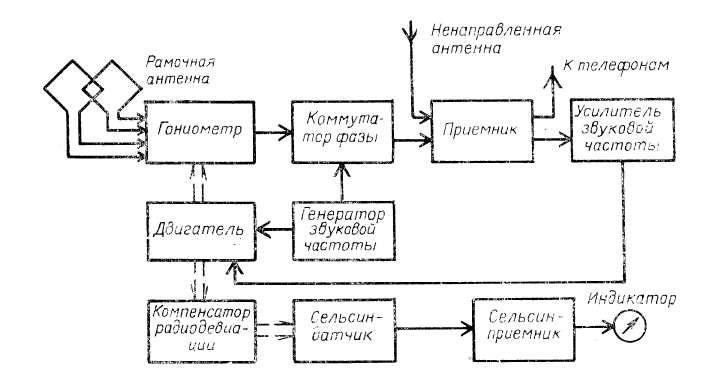
Рис. 8. Структурная схема радиокомпаса
Антенная система АРК включает блок рамочных антенн (БРА), гониометр, и ненаправленную антенну (рис. 8).
В состав БРА входят две одинаковые рамки, оси которых располагаются ортогонально (рис. 9). Ось одной из рамок ориентирована по измерительной оси (х), совпадающей с продольной осью ЛА (рис. 9).
Гониометр включает три обмотки (катушки, рамки): две, расположенные ортогонально, - неподвижные и одну – подвижную (рис. 9).
Выводы каждой рамки БРА подключены встречно к соответствующим неподвижным обмоткам гониометра (рис. 9).
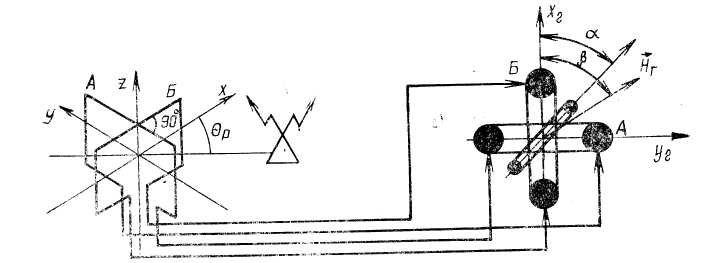
Рис. 9. К пояснению принципа действия двухрамочной антенны АРК
Если
направление на пеленгуемую радиостанцию
не ориентировано по нормали к плоскости
рамки ( ),
то поступившие на рамку ЭМВ, с учетом
времени их распространения от одной
стороны рамки к другой, сформируют в ее
правой и левой стороне различные
электрические потенциалы.
),
то поступившие на рамку ЭМВ, с учетом
времени их распространения от одной
стороны рамки к другой, сформируют в ее
правой и левой стороне различные
электрические потенциалы.
В
результате по обмотке гониометра потечет
ток. Амплитуда тока и его фаза будет
зависеть от величины ( )
и направления отклонения оси рамки от
направления на приводную радиостанцию.
Для второй рамочной антенны происходящие
процессы будут аналогичными.
)
и направления отклонения оси рамки от
направления на приводную радиостанцию.
Для второй рамочной антенны происходящие
процессы будут аналогичными.
В результате, создаваемые токами катушек переменные ЭМПоля, наведут в подвижной катушке гониометра ЭДС. Величина ЭДС, равно как и тока на выходе катушки будет зависеть от , а начальная фаза – от направления на приводную радиостанцию.
Зависимость амплитуды сигнала с подвижной катушки, характеризуется той же кривой, что и для одиночной рамки, но только с учетом того, что поворот подвижной катушки на угол α будет эквивалентен повороту одиночной рамки на угол .