

Применение двигателей переменного тока в системах автоматики.
В основу работы любой электрической машины положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор может быть:
короткозамкнутым;
фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. Сейчас эти двигатели редкость, так как на рынке появились преобразователи частоты, ранее же они очень часто использовались в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте).
Шаговые двигатели в системах автоматике
Двигатели постоянного тока (ДПТ) с постоянными магнитами Lenze начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи
Автоматический контроль, виды автоматического контроля
Автоматический контроль — это автоматическое получение и обработка информации о состоянии объекта и о факторах, влияющих на его работу. В общем случае функция системы автоматического контроля состоит в сравнении контролируемой величины (температуры, скорости и т. д.) с заданным ее значением и фиксировании результатов сравнения в форме, удобной для наблюдения и использования или длительного хранения.
Классификация САК
Различают САК:
- специализированные – для узконаправленных контрольных операций и универсальные;
- встроенные в ОК и внешние по отношению к нему;
- пассивные и активные – в активных используются устройства типа подналадчиков технологических процессов, пассивные – выдают суждение о состоянии объекта, но не принимающие решения об изменении этого состояния, к ним относятся и КСА (контрольно-сортировочные автоматы)
Выды сигнализации применяемые в САР
Устройства автоматического контроля предусматривают три вида сигнализации: контрольную, предупредительную и аварийную. Контрольная сигнализация информирует оператора о работе отдельных аппаратов, машин и механизмов, о положении запорных органов на коммуникациях.
Стркутурная схема разомкнутой сар,последовательность действий, пример.
Системы управления разделяются на разомкнутые и замкнутые системы. Управление по ра-зомкнутому циклу осуществляется без контроля результата.
|
Такое управление называется жестким. Разомкнутые системы применяются для стабилизации и программного управления. Здесь ЗУ - задающее устройство; У - усилитель; ИУ - исполнительное устройство; g - задающее воздействие; U - управляющее воздействие;Y - выходная величина; F - возмущающее воздействие. |
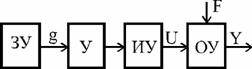 Рис.
1.2 - Функциональная схема разомкнутой
САР
Рис.
1.2 - Функциональная схема разомкнутой
САРЗадающее устройство вырабатывает задающее воздействие g, в соответствии, с которым устанавливается управляющее воздействие U. Управляющим называется воздействие, которое вырабатывает исполнительное устройство (исполнительный элемент). Это воздействие поступает на объект управления и определяет значение выходной величины. На объект управления кроме управляющего всегда действует другое воздействие, называемое возмущающим. Возмущающих воздействий может быть несколько. Возмущающее воздействие нарушает связь между управляющим воздействием и выходной величиной объекта. При постоянном задающем воздействии g изменение возмущающего воздействия F вызывает изменение выходной величины Y. Большинство устройств систем управления являются инерционными.
Схема замкнутой сар
В замкнутых САР управляющее воздействие формируется в непосредственной зависимо-сти от управляемой величины.
|
В замкнутой
системе сигнал с выхода датчика Д,
измеряющего выходную величину,
поступает на вход системы. Такая связь
входа системы с его выходом называется
обратной связью. Сигнал на входе
усилителя равен |
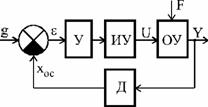 Рис.
1.7 – Функциональная схема замкнутой
САР.
Рис.
1.7 – Функциональная схема замкнутой
САР.
Классификация САР
По назначению алгоритма изменения задающего воздействия (или по виду выполняемых функций)
По количеству контуров регулирования
По количеству регулируемыхтехнологических параметров
По своему функциональномуназначению
По закону регулирования или логикеработы контура регулирования
По характеру используемых для управления сигналов (по роду действия)
По характеру математических соотношений
По виду используемой для регулирования энергии
По принципу регулирования
По направлению действия
По принципу действия
55. Работа асинхронного двигателя с фазным ротором
