

§ 1.4. Теория винтовой пары
Зависимость между моментом, приложенным к гайке, и осевой силой винта. Если винт нагружен осевой силой Т7 (рис. 1.13), то для завинчивания гайки к ключу необходимо приложить момент Гзав, а к стержню винта — реактивный момент Гр, который удерживает стержень от вращения. При этом можно записать
тм=ъ+тр, (1.3)
где Тт — момент сил трения на опорном торїіе гайки; Тр— момент сил трения в резьбе. Равенство (1.3), так же как и последующие зависимости, справедливо для любых винтовых пар болтов, винтов, шпилек и винтовых механизмов.
Рис. 1.13
в)
\п
1
^^1
\Ft
/
Vf
/
f
]
чЛ
Рис.
1.14
TT = Ff(DJ 2), (1.4)
где Dcp=(D1+dOTB)l2; D{—наружный диаметр опорного торца гайки; d0TB — диаметр отверстия под винт; /—коэффициент трения на торце гайки.
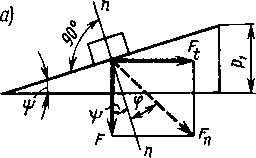
Момент сил трения в резьбе определим, рассматривая гайку как ползун, поднимающийся по виткам резьбы, как по наклонной плоскости (рис. 1.14, а). По известной теореме механики, учитывающей силы трения, ползун находится в равновесии, если равнодействующая Fn системы внешних сил отклонена от нормали п — п на угол трения ср. В нашем случае внешними являются осевая сила F и окружная сила Ft = 2Tp/d2- Здесь Гр—не реактивный, а активный момент со стороны ключа, равный TiaB—Tr [см. формулу (1.3)].
Далее (рис. 1.14), F, = Ftg(\(/ + <p) или
rp = 0,5Mtg(*|/ + <p), (1-5)
где \|/—угол подъема резьбы [по формуле (1.1)]; <p = arctg/np — угол трения в резьбе; /пр — приведенный коэффициент трения в резьбе, учитывающий влияние угла профиля [формула (1.2)].
Подставляя значения моментов в формулу (1.3), найдем искомую зависимость:
Г,ав = 0,5Fd2 [{DJd2)f+ tg (i|/ + ф)]. (1.6)
При отвинчивании гайки окружная сила Ft и силы трения меняют направление (рис. 1.14,6). При этом получим
(1.7)
Момент отвинчивания с учетом трения на торце гайки, по аналогии с формулой (1.6),
Готв = 0,5 Л/2 [(/>ср/</2)/+ (Ф - *)]. (1.8)
Полученные зависимости позволяют отметить:
По формуле (1.6) можно подсчитать отношение осевой силы винта Г к силе приложенной на ручке ключа, т. е. F/FI(, которое дает выигрыш в силе. Для стандартных метрических резьб при стандартной длине ключа 1к\5с1 и /«0,15 F/iг1[ = 70...80 (см. табл. 1.6).
Стержень винта не только растягивается силой Р, но и закручивается моментом Тр.
Самоторможение и к. п. д. винтовой пары. Условие самоторможения можно записать в виде Готв>0, где ТОТВ определяется по формуле (1.8). Рассматривая самоторможение только в резьбе без учета трения на торце гайки, получим tg(<p — \|/)>0 или
1|/«р. (1-9)
Для крепежных резьб значение угла подъема \|/ лежит в пределах 2°30'...3°30', а угол трения <р изменяется в зависимости от коэффициента трения в пределах от 6° (при /«0,1) до 16° (при /«0,3). Таким образом, все крепежные резьбы — самотормозящие. Ходовые резьбы выполняют как самотор- мозящими, так и несамотормозящими.
Приведенные выше значения коэффициента трения, свидетельствующие о значительных запасах самоторможения, справедливы только при статических нагрузках. При переменных нагрузках и особенно при вибрациях вследствие взаимных микросмещений поверхностей трения (например, в результате радиальных упругих деформаций гайки и стержня винта) коэффициент трения существенно снижается (до 0,02 и ниже). Условие самоторможения нарушается. Происходит самоотвин- чивание.
К. п. д. винтовой пары г) представляет интерес главным образом для винтовых механизмов. Его можно вычислить по отношению работы, затраченной на завинчивание гайки без учета трения, к той же работе с учетом трения. Работа завинчивания равна произведению момента завинчивания на угол поворота гайки. Так как углы поворота равны и в том и в другом случае, то отношение работ равно отношению моментов г;ав/гзав, в котором Гзав определяется по формуле (1.6), а г;ав — по той же формуле, но при /=0 и <р = 0:
Л = Пав/ Тзяв = ^1 [(А:р/ё)/+ 1е(\]/ + ф)]. (1.10)
Учитывая потери только в резьбе (Гт=0), найдем к. п. д. собственно винтовой пары:
Т1=^\|/Д§(\|/ + ф). (1.11)
В самотормозящей паре, где \|/ < ф, г|<0,5. Так как большинство винтовых механизмов самотормозящие, то их к. п. д. меньше 0,5.
Формула (1.11) позволяет отметить, что г| возрастает с увеличением \|/ и уменьшением ф.
Для увеличения угла подъема резьбы \|/ в винтовых механизмах применяют многозаходные винты. В практике редко используют винты, у которых ф больше 20...25°, так как дальнейший прирост к. п. д. незначителен, а изготовление резьбы затруднено. Кроме того, при большем значении \|/ становится малым выигрыш в силе или передаточное отношение винтовой пары (см. гл. 14).
Для повышения к. п. д. винтовых механизмов используют также различные средства, понижающие трение в резьбе: антифрикционные металлы, тщательную обработку и смазку трущихся поверхностей, установку подшипников под гайку или упорный торец винта, применение шариковых винтовых пар и пр.
Распределение осевой нагрузки винта по виткам резьбы. На
Т
Рис.
1.15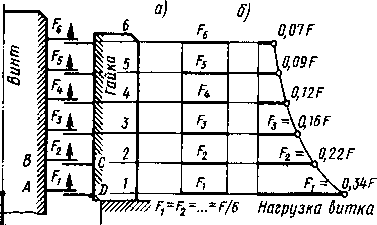
..., ^2, где 2 — ЧИСЛО витков резьбы гайки.
2
Сумма = В об
щем случае ^ не равны между собой. Задача о распределении нагрузки по виткам статически неопределима. Для ее решения уравнения равновесия дополняют уравнениями деформаций. Впервые она была решена Н. Е. Жуковским в' 1902 г. Не излагая это сравнительно сложное решение, ограничиваемся качественной оценкой причин неравномерного распределения нагрузки. В первом приближении полагаем, что стержень винта и гайка абсолютно жесткие, а витки резьбы податливые. Тогда после приложения нагрузки ^ все точки стержня винга (например, А и В) сместятся одинаково относительно соответствующих точек гайки (например, С и £)). Все витки получат равные прогибы, а следовательно, и равные нагрузки (рис. 1.15, а). Во втором приближении полагаем стержень винта упругим, а гайку оставляем жесткой. Тогда относительное перемещение точек А и О будет больше относительного перемещения точек
В и С на значение растяжения стержня на участке АВ. Так как нагрузка витков пропорциональна их прогибу или относительному перемещению соответствующих точек, то нагрузка первого витка больше второго и т. д.
В действительности все элементы винтовой пары податливы, только винт растягивается, а гайка сжимается. Перемещения точки D меньше перемещений точки С на значение сжатия гайки на участке CD. Сжатие гайки дополнительно увеличит разность относительных перемещений точек А И D, В и С и т. д., а следовательно, и неравномерность нагрузки витков резьбы.
Все изложенное можно записать с помощью математических символов. Обозначим А^, Лв, Дс, AD перемещения соответствующих точек. Вследствие растяжения участка А В винта ДВ<ДЛ, а вследствие сжатия участка CD гайки AD<AC.
Относительное перемещение точек А и D, В и С
&AD — &A~ АВС = АВ — Ас-
Учитывая предыдущие неравенства, находим АЛВ>АВС. Следовательно, нагрузка первого витка больше нагрузки второго и т. д.
График распределения нагрузки по виткам, полученный на основе решения системы уравнений для стандартной шестивит- ковой гайки высотой Я=0,8*/, изображен на рис. 1.15, б. В дальнейшем решение Н. Е. Жуковского было подтверждено экспериментальными исследованиями на прозрачных моделях. График свидетельствует о значительной перегрузке нижних витков и нецелесообразности увеличения числа витков гайки, так как последние витки мало нагружены. По этому условию нецелесообразно применение мелких резьб (при высоте гайки Н=const).
Теоретические и экспериментальные исследования позволили разработать конструкции специальных гаек, выравнивающих распределение нагрузки в резьбе (рис. 1.16). На рис. 1.16, а изображена так называемая висячая гайка. Выравнивания нагрузки в резьбе здесь достигают тем, что как винт, так
Рис
1.16
способствует выравниванию нагрузки в резьбе. На рис. 1.16,6 показана разновидность висячей гайки — гайка с кольцевой выточкой. У гайки, изображенной на рис. 1.16, в, срезаны вершины нижних витков резьбы под углом 15...20°. При этом увеличивается прогиб нижних витков винта, так как они соприкасаются с гайкой не всей поверхностью, а только своими вершинами Увеличение прогиба витков снижает нагрузку этих витков.
Специальные гайки особенно желательно применять для соединений, подвергающихся действию переменных нагрузок. Разрушение таких соединений носит усталостный характер и происходит в зоне наибольшей концентрации напряжений у нижнего (наиболее нагруженного) витка резьбы. Опытом установлено, что применение специальных гаек позволяет повысить динамическую прочность резьбовых соединений на
20...30%.
Решение, результаты которого приведены на рис. 1.15, б, справедливо в пределах упругих деформаций и при номинальных значениях размеров. Вследствие большой жесткости резьбы на фактическое распределение нагрузки существенно влияют технологические отклонения размеров; небольшие пластические деформации перегруженных витков, допустимые для крепежных резьб; приработка ходовых резьб. Поэтому при практических расчетах неравномерность распределения нагрузки по виткам резьбы учитывают опытным коэффициентом Кт (см. ниже).