

Плотность металла: кг/м3
Плотность
воды:
![]() кг/м3
кг/м3
Произведем расчет необходимых величин:
Подставив значения в формулу (2.7.3) найдем долю воды в аккумуляции тепла:
 Также
вычисляем долю пара ( 2.7.4) и металла (
2.7.5):
Также
вычисляем долю пара ( 2.7.4) и металла (
2.7.5):
Общую длину труб нагрева определяем по формуле:
![]() м3
(2.7.9)
м3
(2.7.9)
Площадь среза трубы:
![]() м2
(2.7.10)
м2
(2.7.10)
Объем металла определяем как произведение длины труб нагрева и площади среза трубы:
![]() м3
(2.7.11)
м3
(2.7.11)
Для определения объема воды выбираем из спецификации массу воды:
![]() кг
(2.7.12)
кг
(2.7.12)
Тогда объем воды:
![]() м3
(2.7.13)
м3
(2.7.13)
Для нахождения объема парового пространства определим объем пароводяного барабана:
![]() м3
(2.7.14)
м3
(2.7.14)
Тогда объем парового пространства:
![]() м3
(2.7.15)
м3
(2.7.15)
Определим коэффициент аккумуляции тепла парообразующей части котла по формуле (5.7.2):
![]() Полученные
значения подставляем в формулу (5.7.8) и
находим время разгона котла:
Полученные
значения подставляем в формулу (5.7.8) и
находим время разгона котла:
![]() с
с
Коэффициент самовыравнивания котла: Z==0,83
По
полученным значениям
![]() и Z
находим постоянную времени объекта
и Z
находим постоянную времени объекта
![]() и коэффициент усиления объекта
и коэффициент усиления объекта
![]() :
:
![]() с
(2.7.16)
с
(2.7.16)
![]() (2.7.17)
(2.7.17)
По
полученным
![]() и
строим разгонную характеристику (рис.
2.7.1)
и
строим разгонную характеристику (рис.
2.7.1)
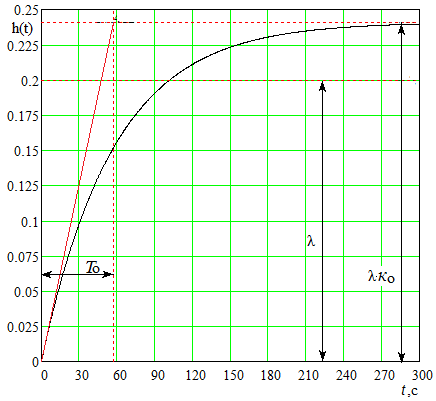
Рис. 2.7.1 Разгонная характеристика объекта регулирования
2.8 Обоснование выбора регулятора давления пара.
В переходных режимах работы котельной установки система автоматического регулирования должна обеспечить возможно меньшие отклонения давления пара, исключить подрыв предохранительных клапанов и уменьшить влияние контура регулирования давления пара на контур регулирования уровня воды. Кроме того, необходимо учитывать влияние контура регулирования давления пара на контур регулирования подачи воздуха. Последний налагает ряд существенных ограничений на процесс регулирования давления пара — необходимо исключить колебательность процесса при возможно меньших динамических рассогласованиях в подаче топлива и воздуха. Очевидно, что различные структуры регуляторов обеспечивают неодинаковое качество переходных процессов.
Выбор регулятора давления пара осуществляется из динамических свойств объекта регулирования и эксплуатационных требований к качеству регулирования. Из полученного выше уравнения динамики известно, что объект одноёмкостный, инерционный, устойчивый, однако свойство саморегулирования незначительно, поэтому для того, чтобы АСР давления пара была работоспособной, необходимо, чтобы регулятор в своей структуре имел корректирующее устройство (ГОС или ЖОС), либо формировал П или ПИ закон регулирования. Наиболее высокая статическая точность обеспечивается ПИ-регулятором. В то же время в переходных режимах с ПИ-регулятором трудно обеспечить апериодический процесс при допустимых динамических отклонениях, что увеличивает динамические рассогласования между подачей топлива и воздуха. Так как установившихся режимов в строгом понятии в судовых котельных установках нет (постоянно существуют возмущения в виде включений различных механизмов и аппаратов, изменения упора винта на волнении и.т п.), во избежание дымности возникает необходимость сжигания топлива с повышенным коэффициентом избытка воздуха, что снижает коэффициент полезного действия (к. п. д.) котельной установки.
Колебательность процесса исчезает с П-регулятором, однако этот регулятор не обеспечивает высокой статической точности, т. е. уступает по этому показателю ПИ-регулятору.
Таким образом, в контуре регулирования давления пара следует отдавать предпочтение ПИ-регуляторам, если имеется возможность посредством настройки регулятора обеспечить апериодический переходный процесс с допустимой величиной динамического отклонения давления пара.
Для регулирования давления пара в котле используется ПИ-регулятор, основу которого составляют микропроцессорные элементы. В схему включены два датчика давления пара, причем один дублирует другой. Сигнал от датчиков поступает на «селективное» устройство, которое выбирает необходимый сигнал, выход с этого устройства идет на фильтр, который пропускает сигналы только с определенным интервалом (частотой). Выходящий сигнал поступает на ПИ-регулятор, а также на «конвертер». С ПИ-регулятора сигнал идет на устройство выбора, результирующее значение поступает на устройство «минимальной оценки», которое также воспринимает входящий сигнал от «конвертера» и выдает конечный результат на управление подачи топлива и воздуха. Также в схеме есть устройство обратной связи, которое воспринимает сигналы по топливу и воздействует на ПИ-регулятор.
Использование микропроцессорного ПИ-регулятора позволяет получить астатическую характеристику контура регулирования давления пара.
Следует иметь ввиду, что выходной сигнал из любого регулятора определяется не только нагрузкой котла, но и степенью открытия топливорегулирующего органа (зависит от качества топлива, температуры его подогрева, износов топливорегулирующего органа и распылителей форсунок), вследствие чего значение этого сигнала при одинаковых нагрузках может быть различным. Это оказывает влияние на коэффициент избытка воздуха, снижая экономичность работы котла.
Функциональная схема ПИ-регулятора имеет вид:
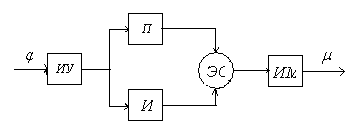
Рис.2.8.1 Функциональная схема ПИ-регулятора.
ИУ – измерительное устройство;
ЭС – элемент сравнения;
П – пропорциональная составляющая;
И – интегральная составляющая;
ИМ – исполнительный механизм;
На основании функциональной строим структурную схему (рис.5.8.2), Передаточные функции элементов регулятора:
![]()
![]() ;
;
![]()
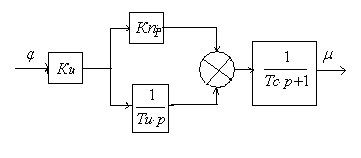
Рис.2.8.2. Структурная схема ПИ-регулятора.
Решая структурную схему ПИ-регулятора уровня, получим передаточную функцию регулятора:
![]()
где
![]() –
коэффициент усиления измерительного
устройства;
–
коэффициент усиления измерительного
устройства;
![]() –
постоянная
времени сервомотора – время перемещения
поршня сервомотора из одного крайнего
положения в другое при максимальном
перепаде давления в его полостях;
–
постоянная
времени сервомотора – время перемещения
поршня сервомотора из одного крайнего
положения в другое при максимальном
перепаде давления в его полостях;
![]() –
коэффициент
пропорциональности регулятора;
–
коэффициент
пропорциональности регулятора;
![]() –
время
интегрирования--т.е. время, за которое
выходной сигнал после нанесения
ступенчатого возмущения достигнет
значения входного сигнала в безразмерных
единицах, отклоняясь с постоянной
начальной скоростью.
–
время
интегрирования--т.е. время, за которое
выходной сигнал после нанесения
ступенчатого возмущения достигнет
значения входного сигнала в безразмерных
единицах, отклоняясь с постоянной
начальной скоростью.
Из передаточной функции регулятора получим уравнение динамики в общем виде:

![]()
Параметрами
настройки ПИ-регулятора являются:
коэффициент усиления регулятора
![]() и время интегрирования
.
и время интегрирования
.
Регулятор давления пара
Регулятор (рис. 2.9.2) предназначен для автоматического поддержания давления пара в котле за счет изменения подачи к форсунке топлива и воздуха. Он состоит из измерительной части--манометра давления пара МДП, регулирующего электронного устройства РУ, перерабатывающего сигнал об изменении давления пара в управляющий сигнал по закону ПИ-регулирования, и исполнительного механизма ИМВЗ с электромотором ЭМ, который управляет работой топочного устройства котла.
Манометр МДП управляет плунжером дифференциального трансформатора; его выходной сигнал в диапазоне 4—20 мА изменяется пропорционально отклонению давления пара от значения, заданного при настройке. Этот сигнал поступает на один из выходов регулирующего устройства, где он выпрямляется и усиливается по напряжению.
Усиленный сигнал поступает на сумматор, где сравнивается с сигналом задатчика. Напряжение задатчика устанавливается регулируемыми резисторами «Грубо» и «Точно», расположенными на лицевой панели. При номинальном значении давления пара в котле сигнал на выходе сумматора равен нулю.
Управление перемещением выходного вала ИМВЗ производится датчиками реле ДР1 и ДР2, которые включаются по сигналам на выходе ПИ-регулятора при нормальной работе котла или по командам системы.
логического управления в периоды розжига либо двухпозиционного регулирования. Включение реле ДР1 вызывает перемещение ИМВЗ в сторону уменьшения, а реле ДР2 — в сторону увеличения подачи топлива и воздуха.
Для того чтобы переходы от логического управления к управлению от регулятора и наоборот не вызывали нежелательных резких перемещений регулирующих органов топлива и воздуха, предусмотрено устройство, согласующее сигналы на выходе регулятора и логических цепей. Это устройство включается в следующих случаях:
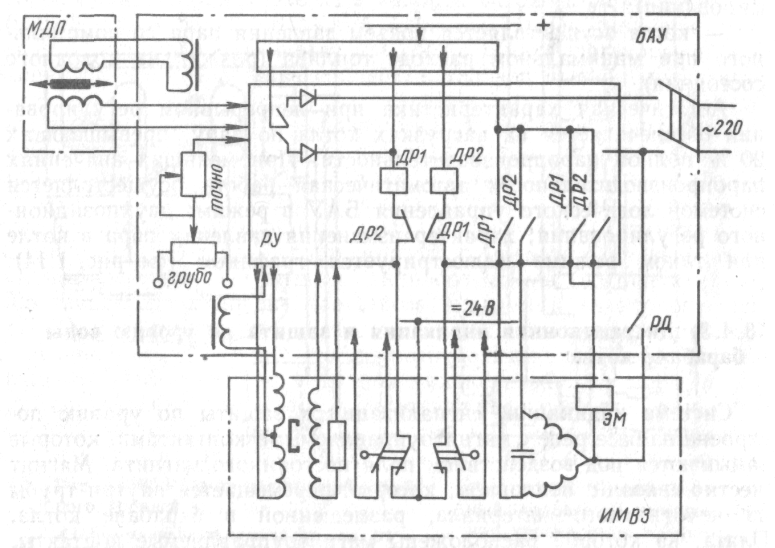
Рис. 2.9.2. Электросхема взаимодействия основных частей регулятора давления пара в котле
регулирующих органов топлива и воздуха, предусмотрено устройство, согласующее сигналы на выходе регулятора и логических цепей. Это устройство включается в следующих случаях:
- когда ИМВЗ тумблером РД отключен от регулятора и управление регулирующими органами производится вручную;
— когда ИМВЗ удерживает минимальную подачу топлива к форсунке при давлении пара в котле ниже номинального (например, в случае остывания котла на циклах позиционного регулирования);
- когда осуществляется подъем давления пара до номинального при минимальном расходе топлива (розжиг из холодного состояния).
Астатическая характеристика при непрерывном регулировании обеспечивается на нагрузках котла по пару, превышающих 20 % полной паропроизводительности. При меньших значениях паропроизводительности автоматическая работа осуществляется системой логического управления БАУ в режиме двухпозиционного регулирования; характер изменения давления пара в котле при таком режиме иллюстрируется графиком