

Изучение конструктивных особенностей и принципа действия электрических машин переменного тока Программа работы
Теоретические исследования
Изучить конструкции, составить конструктивные и принципиальные схемы исполнительных двигателей серии МО, 2АСМ, ДАТ, УАД, ЭМ, АДП, ДИД; тахогенераторов серий AT, ТГ, ТД-2; тахометрических агрегатов серии ДГ; вращающихся трансформаторов и сельсинов ВТ, ВТМ, БС, СГСМ, СС, ЭД, ДС.
Пользуясь справочными данными, определить номинальные значения эксплуатационных параметров машин. Установить связь конструктивной схемы машины с ее функциональным назначением.
Ознакомиться с конструкциями и схемами обмоток электрических машин переменного тока.
Пояснения и указания к работе Асинхронные машины. Назначение, устройство и принцип действия асинхронных машин.
Асинхронные машины - наиболее распространенные электрические машины. Особенно широко они используются как электродвигатели. На долю асинхронных двигателей приходится на менее 80%, всех электродвигателей, выпускаемых электропромышленностью. Они широко используются в устройствах автоматики бытовых и медицинских приборах, устройствах звукозаписи и т.д. Широкое распространение асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании. В настоящее время появилось большое количество разновидностей и модификаций асинхронных машин, в частности, асинхронные исполнительные двигатели, тахогенераторы сельсины, вращающиеся трансформаторы и др.
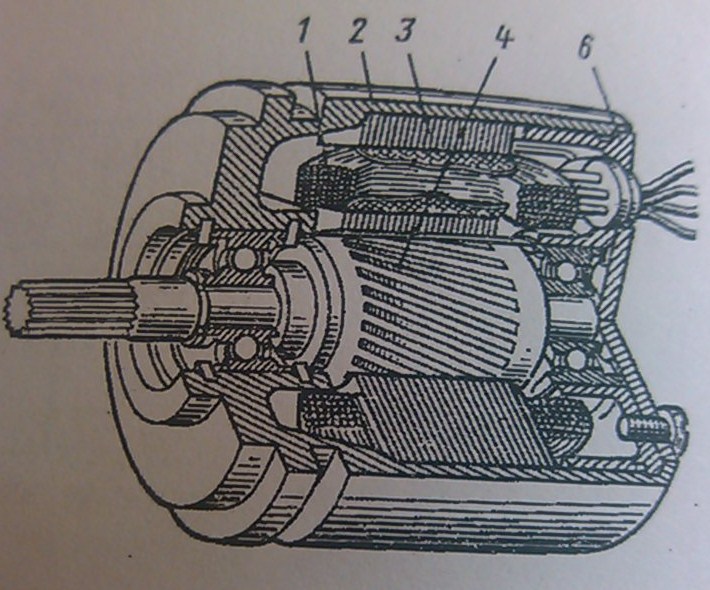
Основным частями любого асинхронного двигателя является (рис. 2.1): неподвижная часть I, называемая статором, и вращающаяся часть 2, называемая роторам. Статор и ротор разделены воздушным зазором, величина которого изменяется в диапазоне 0.1 ...1,5 мм в зависимости от мощности машины. Корпус машины 3 изготавливают из стали или алюминия. Статор машины выполняется из стали шихтованным, что снимает потери на вихревые токи. Листы пакета статора штампуются толщиной 0,35 или 0,5 мм и имеют на заутренней стороне пазы, в которые укладывают обмотку статора. Листы стали перед сборкой в пакет изолируют, покрывая слоем лака.

Рис. 2.1. Принципиальная схема асинхронного двигателя. 1-статор, 2-ротор,
3-корпус.
Пазы статора могут быть открытыми, полуоткрытыми или полузакрытыми (рис.2.2,а). В машинах малой мощности применяются полузакрытые пазы.

Рис. 2.2. Форма пазов статора и ротора.
Ротор асинхронного двигателя обычного исполнения представляет собой набранный из штампованных листов электротехнической стали сердечник с пазами. В зависимости от тока обмоток роторы асинхронных двигателей делятся на короткозамкнутые и фазные. В машинах малой мощности обычно применяют короткозамкнутые роторы, в пазах которых расположены медные или алюминиевые стержни, соединенные с торцов коротко замыкающими кольцами. Обмотка в этом случае имеет вид беличей клетки. Форма пазов ротора может быть самой различной (рис. 2.2.,б).
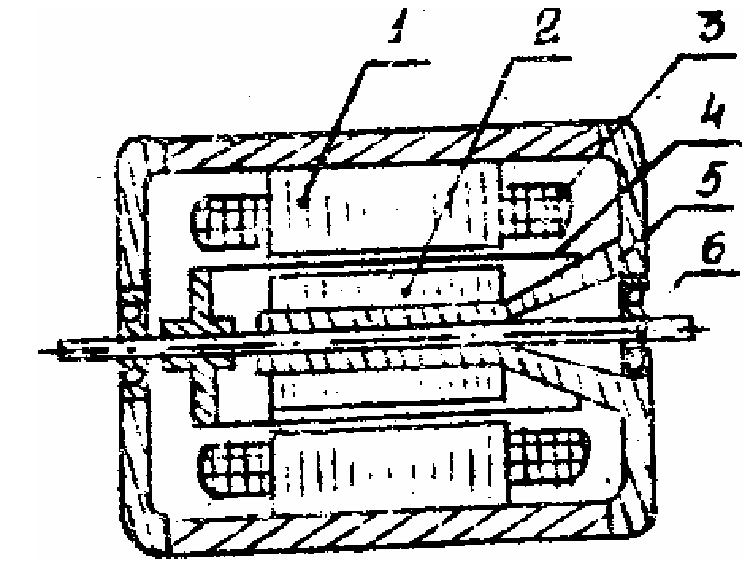
Асинхронные исполнительные двигатели часто имеют полый немагнитный ротор, которым выполняется в виде тонкостенного алюминиевого стакана и не имеет сердечника (рис. 2.3). Такая конструкция обладает малым моментом инерции и обеспечивает весьма ценное свойство – быстродействие Эти двигатели выпускаются мощностью от долей до сотен ватт, как на промышленную, так и на повышенные частоты - 400, 500, 800 и 1000 Гц. Внутренний статор служит для уменьшения магнитного сопротивления на пути рабочего магнитного потока.

а б

в г
Рис. 2.3. Асинхронные двигатели с беличьей клеткой на роторе (а,б):
1– обмотка статора; 2- корпус; 3- статор; 4- ротор; 5– беличья клетка,
6– подшипниковый щит. Асинхронные двигатели с полым немагнитным ротором(в,г): 1– статор; 2 - внутренний статор; 3 - обмотка статора; 4 - полый ротор; 5- корпус, 6- вал.
Асинхронный двухфазный двигатель с полым ротором АДП-123Б.
частота: 400…500 Гц;
номинальная полезная мощность: 8,9 Вт;
потребляемая мощность: 38 Вт;
номинальная скорость: 6000 об/мин;
скорость холостого хода: 7000 об/мин;
номинальный момент на валу: 14,5∙10-4 кГм;
пусковой момент: 17∙10-4 кГм;
момент троганья: 3∙10-5 кГм;
маховый момент: 3,14∙10-6 кГм2;
вес двигателя: 0,5 кг.
Асинхронный двухфазный двигатель с полым ротором ДАТ6-5/400.
напряжение сетевой обмотки: 110 В;
напряжение обмотки управления: 55 В;
частота: 400 Гц;
ток сетевой обмотки: 0,32 А;
мощность на валу: 4,8 Вт;
пусковой момент: 230 Гсм;
скорость вращения: 4000 об/мин;
Ёмкость в цепи сетевой обмотки: 0,25 мкФ;
вес двигателя: 1,9 кг.
Двухфазный асинхронный двигатель с короткозамкнутой обмоткой 2АСМ-200.
частота сети: 50Гц;
номинальное напряжение: 110 В;
номинальная мощность на валу: 2,4 Вт;
номинальный ток фазы: 0,3 А;
номинальная скорость вращения: 1180 об/мин;
кратность пускового момента: 2,8 мп/мном;
вес двигателя: 1,25 кг.
Двухфазный асинхронный двигатель с короткозамкнутой обмоткой 2АСМ-400.
частота сети: 50Гц;
номинальное напряжение: 110 В;
номинальная мощность на валу: 4,6 Вт;
номинальный ток фазы: 0,4 А;
номинальная скорость вращения: 1120 об/мин;
кратность пускового момента: 2,0 мп/мном;
вес двигателя: 1,9 кг.
Двигатель переменного тока с полым немагнитным ротором ЭМ-1М.
напряжение сетевой обмотки: 115 В;
напряжение управляющей обмотки: 60 В;
частота: 400 Гц;
мощность на валу: 1,18 Вт;
номинальная скорость: 2500 об/мин;
синхронная скорость: 8000 об/мин;
скорость холостого хода: 4800 об/мин;
электромеханическая постоянная времени: 15мсек;
кратность пускового момента: 1,75 мп/мном;
вес: 300 г
Двигатель переменного тока с полым немагнитным ротором ЭМ-2М.
напряжение сетевой обмотки: 115 В;
напряжение управляющей обмотки: 60 В;
частота: 400 Гц;
мощность на валу: 2,9 Вт;
номинальная скорость: 4000 об/мин;
синхронная скорость: 8000 об/мин;
скорость холостого хода: 6000 об/мин;
электромеханическая постоянная времени: 20мсек;
кратность пускового момента: 2 мп/мном;
вес: 400 г
Двигатель переменного тока с полым немагнитным ротором ДИД-0,1ТА
напряжение сетевой обмотки: 36 В;
напряжение управляющей обмотки: 30 В;
частота: 400 Гц;
мощность на валу: 0,1 Вт;
номинальная скорость: 7000 об/мин;
синхронная скорость: 24000 об/мин;
скорость холостого хода: 12000 об/мин;
электромеханическая постоянная времени: 140 мсек;
кратность пускового момента: 1,85 мп/мном;
вес: 25 г
Двигатель переменного тока с полым немагнитным ротором ДИД-0,5ТА
напряжение сетевой обмотки: 36 В;
напряжение управляющей обмотки: 30 В;
частота: 400 Гц;
мощность на валу: 0,5 Вт;
номинальная скорость: 10800 об/мин;
синхронная скорость: 24000 об/мин;
скорость холостого хода: 14000 об/мин;
электромеханическая постоянная времени: 80 мсек;
кратность пускового момента: 1,95 мп/мном;
вес: 50 г
Наряду с двигателями, имеющими полые немагнитные (рис. 2.3) и короткозамкнутые роторы (рис. 2.1), в качестве исполнительных и силовых двигателей применяются двигатели с полыми ферромагнитными роторами. Статоры таких двигателей ничем не отличаются от статоров двухфазных асинхронных машин, а ротор выполняется в виде полого ферромагнитного цилиндра, который укрепляется на валу с помощью двух или одной металлических пробок. Так как ротор ферромагнитный и магнитный поток замыкается непосредственно по ротору, отпадает необходимость во внутреннем статоре.
Рассмотрим принцип действия асинхронного двигателя на примере трехфазного двигателя с короткозамкнутой обмоткой ротора. На статоре трехфазной машины расположены три смещенные друг относительно друга на 120 эл. градусов обмотки. Токи фаз сдвинуты друг относительно друга во времени на 1/3 периода. В результате создается вращающееся магнитное поле, частота вращения которого, или синхронная частота
 (2.1)
(2.1)
где ƒ1 - частота питающего тока;
p - число пар полисов обмотки статора, определяется длиной шаге обмотки и схемой ее соединения.
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них э.д.с., направление которой определяется правилом правок руки. На проводники с током, расположенные в магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Если момент этих сил достаточно велик, то ротор приходит во вращение и его установившаяся частота вращения n2 соответствует условию равенства электромагнитного момента тормозному, M=MТ. Тормозной момент создается внутренними силами трения и силами нагрузки механизма, приводимого во вращение. Такой режим работы называется двигательным. Относительную разность частот вращения магнитного поля и ротора называют скольжением
![]() (2.2)
(2.2)
Часто скольжение выражают в процентах. Очевидно, что в двигательном режиме 1 > S > О.
Если ротор асинхронной машины разогнать, например, с помощью двигателя, до частоты больше синхронной, то асинхронная машина перейдет в генераторный режим, при этом S<0 . Если изменить направление вращения ротора (или магнитного поля) так, чтобы магнитное поле и ротор вращались в противоположных направлениях, то машина будет получать из сети активную мощность. Однако в этом случае электромагнитный момент М направлен против вращения ротора, т.е. является тормозящим. Этот режим называют режимом электромагнитного торможения, для него n2<0, S>1.
Таким образом, характерной особенностью асинхронной машины является наличие скольжения, т.е. неравенство частот вращения n1 и n2. Поэтому машину называют асинхронной.