

Регулируемый привод буровых установок: ротора, лебедки и насоса.
Электропривод буровых установок электробура и подъемной лебедки.
В настоящее время на буровых установках используется роторное бурение, которое составляет 45%, и бурение с помощью Турбобуров – 25% и Электробуров 5%.
Роторное:
Привод ротора построен на базе АД с коробкой передач или используется привод ТПД с реверсом поля; В Приводе лебедок применяется АД с ФР (4 ступени) либо ТП-Д с рев. поля или АД с тиристорным коммутатором в роторной цепи.
На установках с глубинами от 2000 до 4000 м технико-экономические расчеты показывают целесообразность применение частично регулируемых электроприводов переменного тока. Для буровых лебедок таких установок перспективен привод от асинхронного двигателя с фазным ротором, управление которым осуществляется при помощи регулятора скольжения в цепи ротора (АД-ТРС). Такой привод позволяет регулировать частоту вращения двигателя при частичной нагрузке, что особенно важно при групповом приводе для вращения ротора. Применение ТРС дает возможность реализовать наиболее простой и экономичный тип электропривода буровой лебедки.
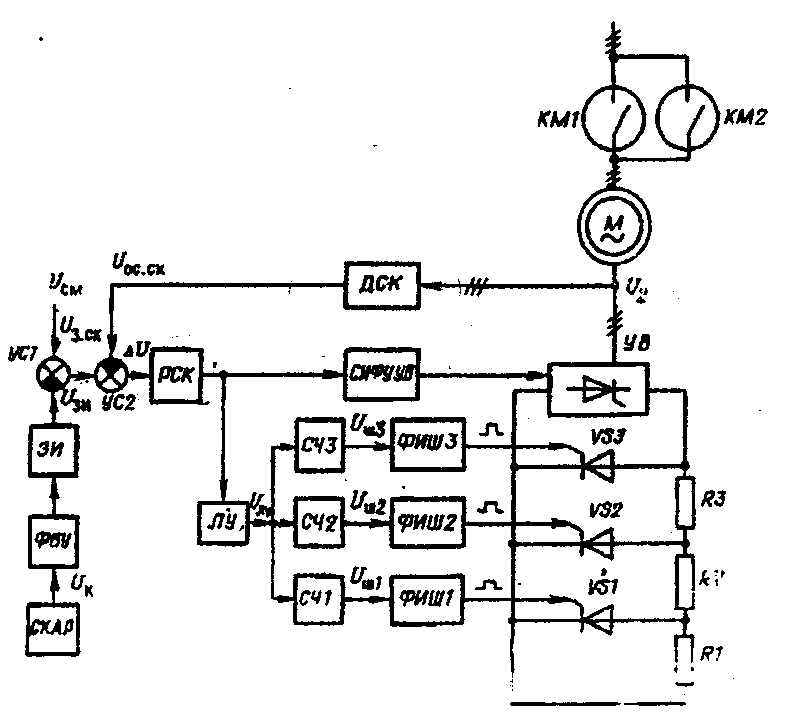
Функциональная схема электропривода приведена на рис. 1.
Асинхрон. двигатель с фазным ротором подключен к сети через реверсор. В цепь ротора двигателя включен трехфазный управляемый выпрямитель УВ, собранный по мостовой схеме. Нагрузкой для выпрямителя служат пусковые сопротивления Rl, R2, R3. В процессе пуска электропривода напряжение и его частота в роторной цепи изменяется в очень широкие пределах. Поэтому для управления УВ применена специальная система импульсно-фазового управления (СИФУ), построенная по вертикальному принципу. В связи с тем, что для синхронизации СИФУ и питания генератора опорного напряжения используется напряжение, пропорциональное роторному напряжению двигателя, такая СИФУ обеспечивает регулирование угла управления выпрямителя в диапазоне от 0 до 180 при изменении частоты напряжения ротора от 5 до 50 Гц и напряжении 2 - 100 % от номинального. При частотах, меньших 5 Гц, и напряжении ротора, меньшем 2 - 3 % от номинального, СИФУ переходит в режим генерации сплошных сигналов на тиристоры, обеспечивая полное открытие выпрямителя.
Напряжение задания со СКАР изменяется в соответствии с положением его ручки. Это напряжение при помощи фазочувствительного выпрямляющего устройства (ФВУ) преобразуется в постоянное напряжение, пропорциональное положению ручки СКАР. Для обеспечения плавности изменения задающего сигнала при быстром перемещении ручки СКАР используется аппериодическое звено, являющееся своеобразным задатчиком интенсивности (ЗИ). Сигнал на выходе ЗИ пропорционален заданной частоте вращения Uзи=kωωз. На входе первого узла сравнения УС1 этот сигнал алгебраически складывается с постоянным сигналом смещения, величина которого пропорциональна максимальной скорости Uсм=кωωmax. Поэтому на входе второго узла сравнения УС2 имеется сигнал, пропорциональный заданной величине скольжения Uз.ск=kωωmaxS3. Во время пуска при повороте ручки СКАР на полный угол задаваемая скорость изменяется от нуля до, ωmax а задаваемое скольжение - от единицы до нуля. В качестве обратной связи по скольжению в САР используется сигнал, пропорциональный напряжению ротора, которое преобразуется при помощи датчика скольжения ДСК. Величина этого сигнала при пуске, так же как и скольжения, изменяется от максимального значения в начальный момент пуска практически до нуля при зашунтированном роторе. Применение САР, замкнутой по скорости, позволяет получить необходимую жесткость характеристик при заданном диапазоне изменения момента нагрузки. В САР использован пропорциональный регулятор скольжения РСК, выходной сигнал которого управляет СИФУ и логическим устройством ЛУ.
В исходном положении величина U=Uзcк-Uoc.cк выбирается так, чтобы УВ был закрыт.
При увеличении сигнала СКАР сигнал задания скольжения будет плавно уменьшаться. Благодаря этому, угол управления УВ уменьшается, а напряжение на его выходе увеличивается, обеспечивая плавное нарастание момента двигателя до трогания о последующим разгоном по регулировочным характеристикам в зоне, ограниченной реостатной характеристикой, соответствующей полному пусковому сопротивлению (R1+R2+R3) в цепи ротора. При выходе двигателя на реостатную характеристику разность между сигналами Uзcк и Uoc.cк становится практически равной нулю. Сигнал на выходе РСК близок к нулю, на его выходе формируется сигнал логической единицы Uлу, запускающий первый счетчик СЧ1. Сигнал этого счетчика запускает первый формирователь импульсов шунтировки ФИШ1, импульсы которого отирают первый Шунтирующий тиристор VS1.
Тиристор открывается и часть пускового сопротивления R1 шунтируется. Это приводит к некоторому возрастанию силы тока в роторной цепи. Благодаря тому, что первая производная этой величины больше нуля, напряжение на кольцах ротора скачкообразно снижается. Сигнал обратной связи Uoс.cк также уменьшается, что приводит к увеличению сигнала на выходе РСК. Благодаря этому, на выходе ЛУ появляется сигнал логического нуля, но импульсы с VS1 не снимаются, и он остается открытым. Кроме того, ненулевой сигнал на выходе РСК увеличивает угол срабатывания альфа, частично закрывая УВ. Закрытие преобразователя при срабатывании шунтирующего тиристора предотвращает появление скачков тока в роторе. Так как задающий сигнал продолжается увеличиваться, происходит дальнейший разгон по регулировочным характеристикам в зоне, ограниченной реостатной характеристикой, соответствующей включенному сопротивлению R1+R2. Срабатывание второго шунтирующего тиристора VS2 и все сопутствующие ему процессы при выходе двигателя на эту реостатную характеристику происходят аналогично рассмотренным. Далее происходит процесс разгона двигателя до реостатной характеристики с сопротивлением R3 и срабатывание последнего шунтирующего тиристора VS3. При этом: УВ полностью закорачивается, обеспечивая выход двигателя на характеристику, близкую к естественной.
Для вывода двигателя на пониженную скорость СКАР устанавливается в промежуточное положение. При этом разгон двигателя закончится на одной из регулировочных или реостатных характеристик.
Таким образом, разработанная система АД - ТРС позволяет формировать пусковые характеристики асинхронного двигателя с практически постоянным динамическим моментом, обеспечивая плавный пуск, выбор люфтов, предварительное натяжение каната, работу на пониженных скоростях.
Однако следует иметь в виду, что введение в цепь ротора вентильного преобразователя снижает перегрузочную способность асинхронного двигателя и увеличивает потери в двигателе от высших гармоник.
До настоящего времени на некоторых буровых установках в приводах лебедок используются синхронные двигатели с электромагнитными муфтами и индукционными или ферропорошковыми тормозами.
В приводе насоса используется двухдвигательные системы с СД(2 насоса) и ТП-Д с реверсом поля.
Для привода подачи используются системы Г-Д и ТП-Д.
Турбобур: Привод насоса на базе АДФ схема АВК
Привод лебедки ТП-Д с реверсом поля
Привод подачи ТП-Д с реверсом поля и ТП-Д отдельно от привода лебедки для тяжелых машин
Буровые установки БУ2000(2500,3000, 4000 и т.д до 10000)
Электробур: те же системы приводов, что и в Турбобуре. Используется трансформатор с большим количеством отпаек напряжение 600-1100В. Двигатели со скоростью вращения 750, 950, 1000об/мин и 2 Контакторами(на дигателе). Подъемная лебедка регулируемая АД с ФР 3-4 ступени. Подача привод постоянного тока (Г-Д и тп.)
