

Регулируемый электропривод конвейеров, области его применения.
Рост производительности и длины конвейеров приводит к росту мощности приводных двигателей, а следовательно, применение в системах электропривода промежуточных муфт (гидравлических, электромагнитных и других типов) становится экономически невыгодным. Поэтому в качестве электропривода для таких конвейеров применяется асинхронный двигатель с фазным ротором. Повышение пускового момента в таком приводе достигается введением резисторов в цепь ротора, а плавность — увеличением числа ступеней (от 10 до 24). Увеличение длительности пуска не сказывается на производительности конвейера, но вызывает значительное снижение динамического момента, а следовательно, и динамических усилий в тяговом органе в период пуска и повышает срок его службы.
Обзор технологических схем шахтного конвейерного транспорта и анализ режимов работы отдельных его звеньев позволили установить, что из-за специфических условий конвейеры постоянно недоиспользуются по производительности. Это в первую очередь объясняется неравномерной работой добычных машин.
Для достижения - возможно полной загрузки конвейеров при неравномерных грузопотоках возникает необходимость в регулировании их производительности от фактического поступления груза.
Основным параметром для автоматического регулирования производительности конвейеров на транспортных линиях с неравномерным потоком является скорость движения грузонесущего органа.
Т ак
как регулирование скорости обеспечивает
равномерную загрузку конвейера, то
сопротивления движению практически
постоянны. Следовательно, приводы
конвейеров должны обеспечивать
регулирование скорости движения
грузонесущего органа при постоянном
моменте на его валу, т. е. при постоянном
натяжении независимо от диапазона
регулирования скорости. Одновременно
со снижением скорости движения тягового
органа, вызванным снижением
производительности добычной машины,
увеличивается срок ее службы, так как
сокращается частота огибания лентой
барабанов. Срок службы ленты при этом
увеличивается почти пропорционально
уменьшению ее скорости. А это особенно
важно, так как стоимость ленты конвейера
составляет от 40 до 75 % . стоимости всей
конвейерной установки, в зависимости
от длины транспортирования. В равной
степени снижается износ и механической
части оборудования.
ак
как регулирование скорости обеспечивает
равномерную загрузку конвейера, то
сопротивления движению практически
постоянны. Следовательно, приводы
конвейеров должны обеспечивать
регулирование скорости движения
грузонесущего органа при постоянном
моменте на его валу, т. е. при постоянном
натяжении независимо от диапазона
регулирования скорости. Одновременно
со снижением скорости движения тягового
органа, вызванным снижением
производительности добычной машины,
увеличивается срок ее службы, так как
сокращается частота огибания лентой
барабанов. Срок службы ленты при этом
увеличивается почти пропорционально
уменьшению ее скорости. А это особенно
важно, так как стоимость ленты конвейера
составляет от 40 до 75 % . стоимости всей
конвейерной установки, в зависимости
от длины транспортирования. В равной
степени снижается износ и механической
части оборудования.
П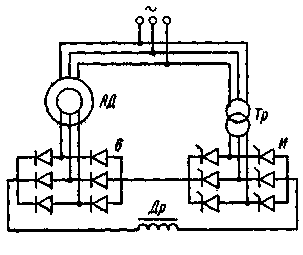 оэтому
в качестве электропривода ленточных
конвейеров становится целесообразным
применение регулируемого электропривода.
Для ленточного конвейера может быть
использован- электропривод переменного
тока на базе асинхронного двигателя с
фазным ротором по системе асинхронного
вентильного каскада (АВК). Исходя из
принципа работы системы АВК, напряжение
ротора на выходе выпрямителя
уравновешивается напряжением
инвертора и падением напряжения в цепи
постоянного тока.
оэтому
в качестве электропривода ленточных
конвейеров становится целесообразным
применение регулируемого электропривода.
Для ленточного конвейера может быть
использован- электропривод переменного
тока на базе асинхронного двигателя с
фазным ротором по системе асинхронного
вентильного каскада (АВК). Исходя из
принципа работы системы АВК, напряжение
ротора на выходе выпрямителя
уравновешивается напряжением
инвертора и падением напряжения в цепи
постоянного тока.
Механические характеристики АВК приведены на рис.. Анализ механических характеристик системы АВК показывает, что жесткость механических характеристик во всем диапазоне регулирования скорости привода достаточно высока, правда, несколько меньше жесткости естественной характеристики 1, но не уступает жесткости механических характеристик электропривода по системе генератор — двигатель (Г—Д).
Асинхронно-вентильный каскад состоит из асинхронного двигателя АД, вентильного преобразователя В, инвертора И, сетевого трансформатора Тр (рис.). Эта схема относится к категории каскадов с промежуточным звеном постоянного тока. Вентильный преобразователь В является неуправляемым и предназначен для выпрямления тока ротора, имеющего частоту скольжения. Затем выпрямленный ток с помощью инвертора И преобразуется в переменный ток частотой, равной частоте сети. Для сглаживания выпрямленного тока включен дроссель Др.
Принцип действия каскада заключается в следующем. В цепь выпрямленного тока ротора вводится с помощью инвертора И регулируемая добавочная э. д. с.