

Нерегулируемый электропривод шахтных конвейеров, проблемы пуска электропривода.
Привод ленточного (скребкового) конвейера предназначен для передачи ленте (цепи) тягового усилия, сообщения ей необходимой скорости и обеспечения режимов пуска и останова. Привод ленточного (скребкового) конвейера состоит из электродвигателя, редуктора, муфты и тормоза. В состав привода конвейера может быть введена гидравлическая или электромагнитная муфта. Определение составных элементов привода ленточных (скребковых) конвейеров и выбор системы управления ими должны базироваться на знании: режима работы конвейера; числа приводных барабанов и электродвигателей; месторасположения приводных барабанов; условий работы.
Рассмотрим влияние вышеперечисленных факторов на элементы привода конвейера и системы управления им.
Режим работы конвейера характеризуется:
продолжительной работой в течение значительного промежутка времени, так как загрузка, транспортирование и разгрузка осуществляются непрерывно, без остановок.
редкими пусками и остановами, что объясняется продолжительным режимом работы конвейера
постоянством направления движения тягового органа конвейера, что обусловливает применение нереверсивной схемы управления электродвигателем;
неравномерностью нагрузки. Это в первую очередь касается скребковых конвейеров, работающих в комплексе с очистными комбайнами или стругами.
сравнительно тяжелыми условиями пуска. Тяжелый пуск — это пуск конвейера под нагрузкой, объясняемой наличием груза на ленте или ставе скребкового конвейера после аварийной его остановки.
Условия, в которых эксплуатируются шахтные конвейеры, характеризуются большой стесненностью рабочего места и его непостоянством, различным наклоном и протяженностью горных выработок, запыленностью и влажностью окружающей среды, химической активностью шахтных вод, механическим воздействием от обрушающихся кусков горных пород, взрывоопасностью рудничной атмосферы, внезапностью выбросов угля и газа.
Конвейеры, установленные на поверхности шахт и рудников или на обогатительных фабриках, не подвержены вышеперечисленным воздействиям и поэтому условия их эксплуатации значительно лучшие.
Условия эксплуатации, режимы работы и конструктивные исполнения приводных станций скребковых и ленточных конвейеров формируют следующие требования, предъявляемые к их электроприводам:
использование в качестве электропривода рудничных и взрывозащищенных электродвигателей повышенной надежности под землей и защищенных или нормального исполнения электродвигателей на поверхности. Те же требования предъявляются и к аппаратуре управления электродвигателями;
обеспечение высокой перегрузочной способности при возможно меньших пусковых токах;
обеспечение плавности пуска;
равномерное распределение нагрузки между электродвигателями при многодвигательном электроприводе
Основным видом привода конвейеров и питателей в настоящее время служит электропривод переменного тока. Применение асинхронного короткозамкнутого электродвигателя позволяет ликвидировать коллектор, имеющийся у двигателя постоянного тока и щетки — у асинхронного двигателя с фазным ротором, упростить конструкцию, повысить надежность и уменьшить (для одинаковых мощностей) габаритно-весовые показатели электропривода. Особенно это относится к электродвигателям взрывозащищенного исполнения, широко используемым на шахтах, опасных по газу или угольной пыли. Такие двигатели, специально предназначенные для привода конвейеров, имеют высокую перегрузочную способность и высокие пусковые моменты при сравнительно низких пусковых токах. Кратность начальных пусковых моментов конвейерных электродвигателей находится в пределах 2,5—3,0, что обеспечивает пуск загруженных конвейеров. Однако наличие слабины скребковой цепи или ленты конвейера и при запуске конвейера в холостую, резкое приложение повышенного движущего момента могут вызвать значительную динамическую перегрузку в ленте или цепи. Поэтому прямой пуск конвейера возможен лишь для конвейеров малой длины, у которых слабина цепи или ленты незначительна.
Д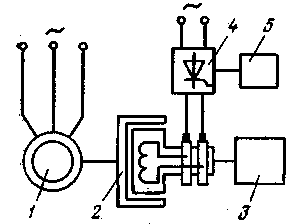 ля
пуска длинных конвейеров необходимо
плавное приложение движущего момента,
что позволит снизить перенапряжения
в тяговом органе, вызываемые упругими
деформациями. С этой целью между
двигателем и приводным барабаном
устанавливается гидро- или
электромагнитная муфта. Применение
муфт позволяет не только обеспечить
плавный пуск и снижение динамических
перегрузок, но и ликвидировать пробуксовку
ленты, крайне опасную для ленточных
конвейеров.
ля
пуска длинных конвейеров необходимо
плавное приложение движущего момента,
что позволит снизить перенапряжения
в тяговом органе, вызываемые упругими
деформациями. С этой целью между
двигателем и приводным барабаном
устанавливается гидро- или
электромагнитная муфта. Применение
муфт позволяет не только обеспечить
плавный пуск и снижение динамических
перегрузок, но и ликвидировать пробуксовку
ленты, крайне опасную для ленточных
конвейеров.
По быстродействию, простоте управления и эксплуатации электромагнитные муфты скольжения превосходят гидромуфты, -но имеют серьезный недостаток — высокую стоимость и большие габариты, которые соизмеримы со стоимостью и габаритами приводного асинхронного двигателя.
Н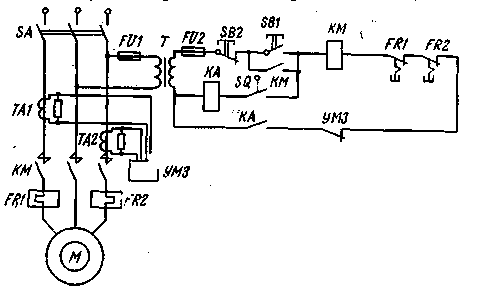 а
рис. показана одна из типовых схем.
Управление асинхронным двигателем с
короткозамкнутым ротором осуществляется
с помощью магнитного пускателя. Под
управлением: в данном случае подразумеваются
операции пуска и останова электродвигателя,
а следовательно, и конвейера, а также
отключение электродвигателя от сети
при нарушении нормального режима
работы. Пуск электродвигателя производится
кнопкой SB1,
останов — кнопкой SB2.
Подключение статора электродвигателя
и отключение осуществляется линейным
контактами КМ магнитного пускателя,
приводимыми в движение контактором
КМ. Защита электродвигателя от токов
к. з. осуществляется блоком УМЗ (устройство
максимальной защиты), на входы которого
включены трансформаторы тока ТА1 и ТА2,
а на выходе — размыкающий контакт УМЗ,
находящийся в цепи управления. Защита
электродвигателя от перегрузки
осуществляется тепловыми реле FR1
и FR2,
а от снижения напряжения — контактором
КМ. Защита цепей управления и
понижающего трансформатора Т от токов
к. з. выполнена плавкими предохранителями
FU1
и FU2.
а
рис. показана одна из типовых схем.
Управление асинхронным двигателем с
короткозамкнутым ротором осуществляется
с помощью магнитного пускателя. Под
управлением: в данном случае подразумеваются
операции пуска и останова электродвигателя,
а следовательно, и конвейера, а также
отключение электродвигателя от сети
при нарушении нормального режима
работы. Пуск электродвигателя производится
кнопкой SB1,
останов — кнопкой SB2.
Подключение статора электродвигателя
и отключение осуществляется линейным
контактами КМ магнитного пускателя,
приводимыми в движение контактором
КМ. Защита электродвигателя от токов
к. з. осуществляется блоком УМЗ (устройство
максимальной защиты), на входы которого
включены трансформаторы тока ТА1 и ТА2,
а на выходе — размыкающий контакт УМЗ,
находящийся в цепи управления. Защита
электродвигателя от перегрузки
осуществляется тепловыми реле FR1
и FR2,
а от снижения напряжения — контактором
КМ. Защита цепей управления и
понижающего трансформатора Т от токов
к. з. выполнена плавкими предохранителями
FU1
и FU2.
Э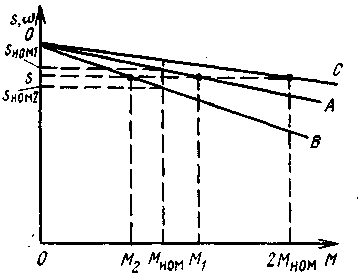 лектроприводы
шахтных ленточных и скребковых конвейеров
выполняются как однодвигательными, так
и многодвигательными. Число
электродвигателей в одном приводе может
достигать пяти.
лектроприводы
шахтных ленточных и скребковых конвейеров
выполняются как однодвигательными, так
и многодвигательными. Число
электродвигателей в одном приводе может
достигать пяти.
В этом случае результирующая механическая характеристика многодвигательного электропривода получается суммированием характеристик отдельных электродвигателей. Однако следует иметь в виду, что даже при одинаковых паспортных данных электродвигатели будут иметь разные параметры. Последнее обстоятельство будет служить причиной неравномерного распределения нагрузки между двигателями. Согласно ГОСТ 183—74 для асинхронных двигателей с короткозамкнутым ротором допускается отклонение номинальных скольжений в пределах ±20 %.
Рассмотрим двухдвигательный привод конвейера, состоящий из двух асинхронных двигателей с короткозамкнутым ротором, имеющих жесткую связь между собой. Рабочие части механических характеристик показаны на рис. отрезками прямых ОА и ОВ. Неодинаковость номинальных скольжений электродвигателей приводит к тому, что при совместной их работе при номинальном моменте один из двигателей, а другой— недогружен.
Длительная эксплуатация такой системы невозможна, так как может привести к выходу из строя перегруженного электродвигателя. Поэтому решение проблемы выравнивания нагрузок между асинхронными короткозамкнутыми двигателями, работающими на один вал— задача первостепенной важности. С этой целью могут быть применены различные устройства (гидро-, электромагнитные муфты).
В последнее время появились тиристорные схемы управления асинхронными двигателями как с фазным, так и с короткозамкнутым ротором. Такие схемы позволяют автоматически изменять жесткость механических характеристик, поддерживая тем самым равномерную загрузку каждого из приводных двигателей.