

11.7 Анализ ситуации и выбор маневра
Получение информации об элементах движения цели. Элементы движения цели могут быть приближенно определены глазомерно с экрана индикатора ситуации, работающего в режиме ЛИД. Курс цели определяется по направлению ЛИД, а скорость примерно сопоставлением длины вектора цели с длиной вектора своего судна.
В случае необходимости данные о курсе и скорости цели могут быть запрошены в цифровой форме вызовом на индикацию формуляра этой цели и переключением его в положение «Курс — Скорость» (если данные формуляра индицируются попарно). Запрос цифровых данных о курсе и скорости цели может быть применен, например, когда ожидается маневр цели с тем, чтобы его зафиксировать раньше (определить сторону изменения курса цели).
11.8 Обнаружение маневра цели.
Маневр цели может быть обнаружен в процессе систематического наблюдения за ЛИД или ЛОД цели или выведенными на формуляр цифровыми данными о Дкр, Ткр или Кц, Vц. Следует иметь в виду, что изменение направления ЛОД цели не всегда свидетельствует об изменении ее курса, направление ЛОД меняется и при изменении скорости цели.
Для обнаружения маневра цели могут использоваться также хранящиеся в памяти ЭВМ данные о предыдущих позициях цели. К стандартным САРП предъявляется требование по запросу воспроизвести на экране по крайней мере 4 предшествующих позиции любой цели, сопровождаемой не менее 8 мин. Временной интервал между этими позициями должен быть одинаковым. Предшествующие позиции можно показать как в режиме ЛИД, так и в режиме ЛОД. Важно помнить, что предыдущее поведение цели может некоторым образом указать на ее намерения. Так, если цель совершила маневр для расхождения с другой целью, можно предположить, что в ближайшем будущем она может возвратиться к прежним элементам движения.
В некоторых САРП имеется возможность использовать предупредительную сигнализацию, включающуюся при резком изменении элементов движения цели. В этом случае на экране мерцает вектор маневрирующей цели (символ в отличие от опасной цели не мерцает) и загорается кнопка «Маневр цели».
11.9 Точность определения элементов движения цели.
Дополнительно на точность расчета курса и скорости цели влияют погрешности датчиков курса и скорости своего судна. Значительные случайные погрешности в определение курса и скорости цели вносит существенное несовпадение курса и скорости перемещения антенны РЛС с курсом и скоростью судна за период 1 оборота антенны. При частоте вращения антенны 16 об/мин период поступления информации о цели составит 3,75 с. За это время судно, имеющее скорость 16 уз, пройдет около 30 м. Вследствие бортовой качки с θ = 10° антенна РЛС может сместиться перпендикулярно курсу до 5 м. Примерно такое же поперечное смещение антенны возникает вследствие рыскания судна при расположении антенны в кормовой части судна. Вследствие этого фактическое перемещение антенны РЛС может существенно отличаться от перемещения центра тяжести судна. При расчете Кц и Vц к вектору относительной скорости цели (по отношению к антенне РЛС) прибавляется вектор скорости центра тяжести судна, а надо бы прибавлять вектор скорости антенны (который неизвестен). Возникающие вследствие этого существенные погрешности сглаживаются в ЭВМ специальным алгоритмом, принимающим в учет 18—20 последовательно полученных значений Кц и Vц. Вследствие этого погрешности сглаженного значения Кц и Vц становятся существенно меньше, но все равно достигают 3—7° для курса и 0,8—1,2 уз для скорости цели.
Оценка ситуации с использованием ЛИД менее достоверна, чем при использовании ЛОД или цифрового формуляра Дкр и Ткр.
На определение курса и скорости цели существенно влияет выбор датчика скорости: относительный или абсолютный лаг. Для целей расхождения судов в море подача на САРП информации от абсолютного лага представляет опасность и не столько с точки зрения точности, сколько с точки зрения возможных погрешностей интерпретации ситуации. Например, при использовании абсолютного лага в случае расхождения со встречной целью на течении, направленном в борт судна, на экране индикатора вместо ситуации расхождения на встречных курсах будет наблюдаться ситуация пересекающихся курсов. Это может привести к неверной оценке ситуации и выбору неверного маневра (рис. 26).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
ТЕЧЕНИЕ |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
а) |
|
|
|
|
|
б) |
|
|
|
|
|
|
с) |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||









Рисунок 26 - Ошибки интерпретации при использовании абсолютного лага:
а — ситуация сближения в море; б — индикатор ситуации с относительным лагом (режим ЛИД); в — индикатор ситуации с абсолютным лагом (режим ЛИД)
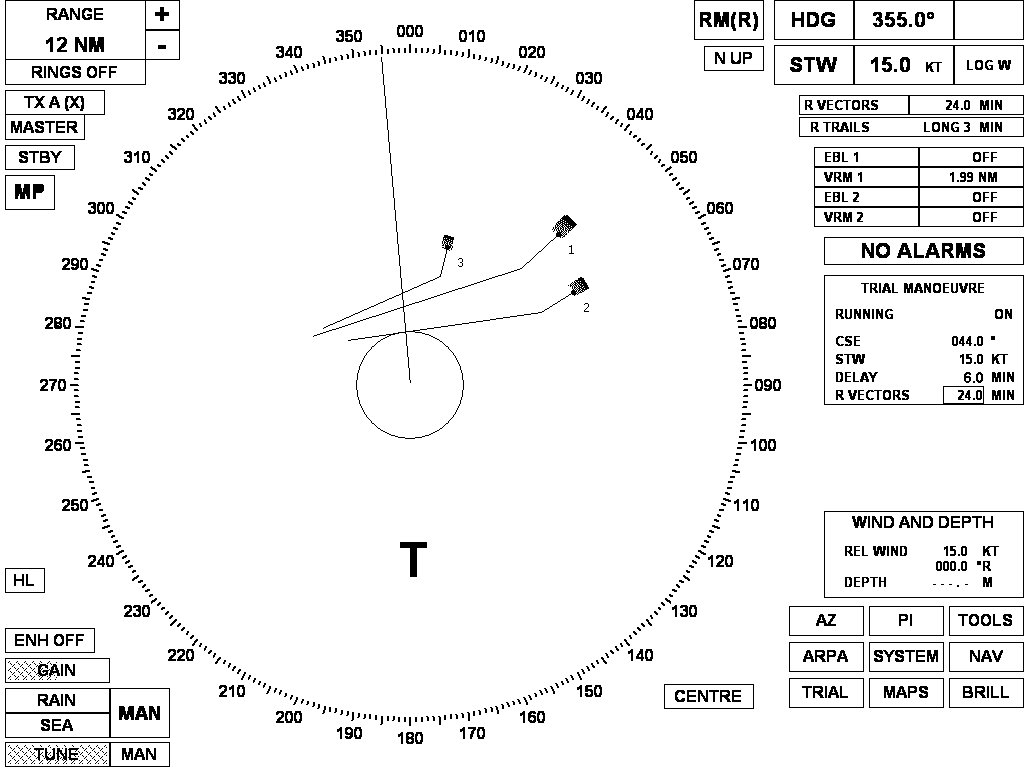
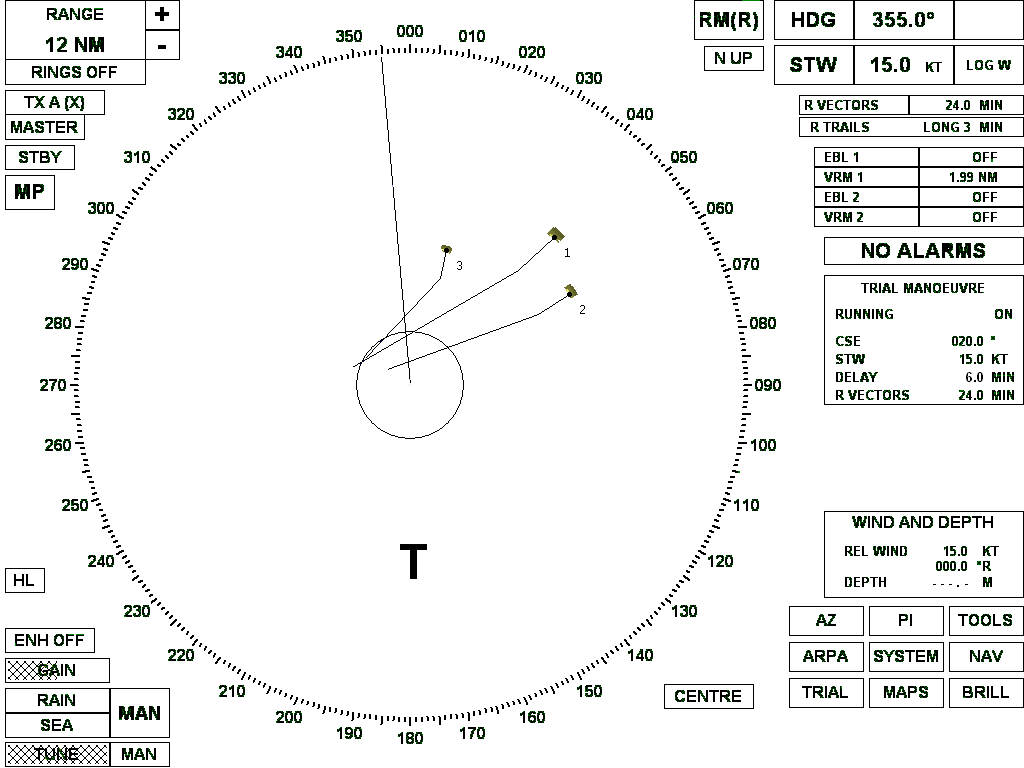
Особенности работы в режиме проигрывания маневра. Проигрывание маневра достигается путем введения предполагаемого курса своего судна и его предполагаемой скорости, а также временной задержки от проигрывания маневра до его осуществления. При включении режима проигрывания маневра ЭВМ продолжает сопровождение целей и обычную работу по расчету фактических Дкр, Ткр, но на экран индикатора подается не фактическая обстановка, а предполагаемая после осуществления маневра. Учитывая опасность принять прогнозируемую ситуацию за развивающуюся фактически, в САРП предусматривается ряд мер, направленных на предупреждение подобной ошибки. Кнопка «Имитация маневра» часто делается подпружиненной, так что при ее отпускании сразу подается на экран фактически развивающаяся ситуация, или зажигается табло «Имитация маневра».
Метод изображения при проигрывании маневра может быть статическим и динамическим. В первом случае изображаются векторы относительного движения, которые будут результатом предполагаемого маневра (см. рис.27). Во втором случае все сопровождаемые суда и свое судно заставляют перемещаться со скоростью, во много раз больше реальной (примерно в 30 раз), показывая в каждом из промежуточных положений промежуточные ЛОД. Буква «Т» в центральной нижней части экрана говорит судоводитель о том, что радар находится в режиме проигрывания маневра и положение целей на экране может не соответствовать их действительному расположению Проигрывание маневра может осуществляться и в режиме ЛИД. При проигрывании маневра учитываются задержка времени до выполнения маневра и динамические свойства судна. Судоводитель, наблюдая за предполагаемым развитием ситуации, подбирает необходимое изменение курса и (или) скорости своего судна. В момент отпускания кнопки «Имитация маневра» ЭВМ запоминает последние значения предполагаемых курса и скорости своего судна. Спустя предварительно установленное судоводителем время задержки загорается табло «Начать маневр», и высвечиваются значения Кн' и Vн' которые были подобраны в режиме имитации маневра.

а) б)
Рисунок 27 – Проигрывание маневра на экране САРП (время задержки 6 минут).
а) Отворот на новый курс 20º - ОЛОДы проход на расстоянии меньше чем Дзад.,
б) отворот на новый курс 44º- ОЛОДы проход на расстоянии не меньше чем Дзад.