

50.Расчет мощности и выбор двигателей при кратковременном режиме работы.
График работы двигателя в кратковременном режиме приведен на рис. 6.6. Исходя из определения этого режима, можно ограничиться рассмотрением одного периода работы двигателя. Превышение температуры определяется уравнением
τ=τу(1−e−t/Tн).
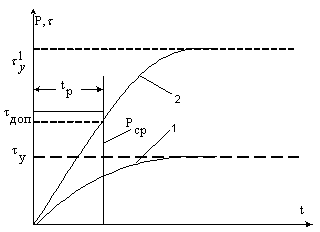
Рис. 6.6. График работы двигателя в кратковременном режиме
Если выбрать двигатель, предназначенный для продолжительного режима работы мощностью Pср, то при кратковременном режиме работы превышение температуры не достигнет допустимого значения (τдоп) (рис. 6.6, кривая 1). Поэтому в этом режиме двигатель оказывается недоиспользован по нагреву.
При заданной нагрузке и времени рабочего периода tр в тепловом отношении будет полностью использован двигатель меньшей мощности, превышение температуры которого ко времени tр будет равноτдоп (рис. 6.6, кривая 2). При этом двигатель будет кратковременно перегружаться, а установившаяся температура для него окажется равной τу1>τу=τдоп. Перегрузка может быть значительной при малых tр.
Соотношение между τу1 и τу может быть найдено из выраженияτу=τу1(1−e−t/Tнср),
где Tнср – среднее значение постоянной времени нагрева в начале и в конце процесса нагрева, τу=ΔPном/Aи τу1=ΔPкр/A; ΔPкр – потери мощности в двигателе при нагрузке Pкр. Отношение потерь при кратковременной нагрузке к потерям при номинальной нагрузке при условии одинакового перегрева двигателя называется коэффициентом термической перегрузки. Значение этого коэффициента может быть получено из (
pт=ΔPкр/ΔPном=1/(1−e−tр/Tнср).
51 Расчет мощности и выбор двигателей при повторно-кратковременном режиме работы. Расчет мощности при повторно-кратковременном режиме работы (s3)
К такому виду могут быть сведены графики, имеющие чередование рабочего режима и режима паузы. Когда в рабочем режиме нагрузка меняется (для режимов S4, S5), необходимо воспользоваться формулами для эквивалентной нагрузки и привести график к простому виду (рис. 6.7).
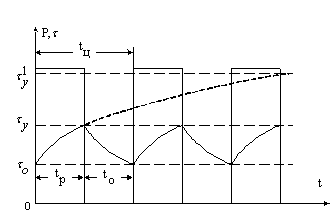
Рис. 6.7. График работы двигателя в повторно-кратковременном режиме
В повторно-кратковременном режиме работы после окончания теплового переходного процесса колебания температуры осуществляются в пределах от τ0 до τу=τдоп.
Выбор мощности двигателя, если мы имеем стандартную продолжительность включения, не вызывает затруднения. Просто необходимо выбрать двигатель на заданный ток, момент или мощность, при имеющейсяПВ. Но, если фактическая продолжительность включения отличается от стандартной, требуется расчет. Здесь на основании метода эквивалентных потерь можно утверждать, что средняя температура перегрева двигателя при его работе с мощностью P1≠Pн при ПВ1≠ПВст не будет превышать допустимую в том случае, если средние потери за цикл при P1 и ПВ1 не будут превышать средние потери за тот же цикл при Pн и ПВст, т.е. если(ΔP1tр1)/(tр1+t01)≤(ΔPнtр)/(tр+t0),илиΔP1ПВ1≤ΔPнПВст.Отсюда условие выбора двигателя
ΔPн≥ΔP1×ПВ1/ПВст.
52.Расчет мощности и выбор двигателей при повторно-кратковременном режиме работы. Метод эквивалентных величин. Расчет мощности при повторно-кратковременном режиме работы (s3)
К такому виду могут быть сведены графики, имеющие чередование рабочего режима и режима паузы. Когда в рабочем режиме нагрузка меняется (для режимов S4, S5), необходимо воспользоваться формулами для эквивалентной нагрузки и привести график к простому виду (рис. 6.7).
Рис. 6.7. График работы двигателя в повторно-кратковременном режиме
В повторно-кратковременном режиме работы после окончания теплового переходного процесса колебания температуры осуществляются в пределах от τ0 до τу=τдоп.
Выбор мощности двигателя, если мы имеем стандартную продолжительность включения, не вызывает затруднения. Просто необходимо выбрать двигатель на заданный ток, момент или мощность, при имеющейсяПВ. Но, если фактическая продолжительность включения отличается от стандартной, требуется расчет. Здесь на основании метода эквивалентных потерь можно утверждать, что средняя температура перегрева двигателя при его работе с мощностью P1≠Pн при ПВ1≠ПВст не будет превышать допустимую в том случае, если средние потери за цикл при P1 и ПВ1 не будут превышать средние потери за тот же цикл при Pн и ПВст, т.е. если(ΔP1tр1)/(tр1+t01)≤(ΔPнtр)/(tр+t0),илиΔP1ПВ1≤ΔPнПВст.Отсюда условие выбора двигателяΔPн≥ΔP1×ПВ1/ПВст.53. Регулирование скорости асинхронного двигателя в асинхронно-вентильном каскаде.
Принцип регулирования скорости асинхронного двигателя в каскадных схемах заключается во введении в роторную цепь добавочной ЭДС Едоб. Ток ротора в этом случае определяется разностью векторов ЭДС ротора Е2 и добавочной Едоб:
I2=(E2-Eдоб)/Z
Где Z – полное сопротивление роторной цепи.
Из записанного выражения следует , что изменяя величину Eдоб, можно регулировать ток ротора, а следовательно, и момент двигателя, и в конечном итоге, скорость.
Исходя из удобства практической реализации, наиболее целесообразно в цепи ротора суммировать не трехфазном переменную ЭДС, а ЭДС постоянного тока. С этой целью в цепь ротора двигателя включается выпрямитель. Источником добавочной ЭДС тогда может служить либо машина постоянного тока (вентильно-машинный каскад), либо статический преобразователь, подключенный к питающей сети (вентильный каскад).
54-----------.
55.----------
56.Динамическое торможение двигателя постоянного тока последовательного возбуждения при самовозбуждении.
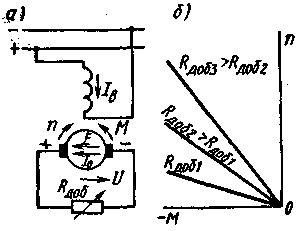
Динамическое торможение. При этом виде торможения двигателя с параллельным возбуждением обмотку якоря отключают от сети и присоединяют к ней реостат Rдо6 (рис. 8.72, а) При этом машина работает как генератор, создает тормозной момент, но выработанная электрическая энергия бесполезно гасится в реостате. Регулирование тока Ia = Е/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб, подключенного к обмотке якоря
(рис. 8.72, б), или ЭДС Е (воздействуют на ток возбуждения). При n = 0 тормозной момент Мравен нулю, следовательно, машина не может быть заторможена в неподвижном состоянии.
|
Рис. 8.72. Схема и механические характеристики двигателя с параллельным возбуждением в режиме динамического торможения |
|
Рис. 8.73. Схемы машины с последовательным возбуждением в режимах двигательном (в) и динамического торможения (б) |
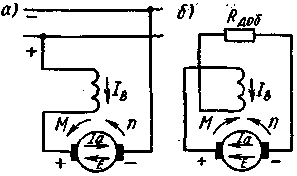
Двигатель с последовательным возбуждением может работать в режиме динамического торможения при независимом возбуждении и при самовозбуждении. При независимом возбуждении обмотку возбуждения отключают от обмотки якоря и подключают к питающей сети последовательно с резистором, сопротивление которого выбирают так, чтобы ток возбуждения не превышал номинального значения. При этом механические характеристики двигателя линейные (см. рис. 8.72, б). При самовозбуждении при переводе машины в генераторный режим необходимо переключить провода, подводящие ток к обмотке возбуждения (рис. 8.73, а, б). Последнее необходимо для того, чтобы при изменении направления тока в якоре (при переходе с двигательного режима в генераторный) направление тока в обмотке возбуждения оставалось неизменным и создаваемая этой обмоткой МДС Fв совпадала по направлению с МДС Fост от остаточного магнетизма. В противном случае генераторы с самовозбуждением размагничиваются.