41.Регулирование скорости электропривода с двигателем постоянного тока последовательного возбуждения изменением магнитного потока.
Для получения простейшей модели электропривода постоянного тока, описывающей установившиеся (статические) режимы и позволяющей получить основные характеристики, Будем полагать, что якорная цепь питается от независимого источника с напряжением U* , сопротивление цепи якоря R постоянно, магнитный поток Фопределяется лишь током возбуждения и не зависит от нагрузки (реакция якоря не проявляется), индуктивные параметры цепей пока не учитываются, поскольку рассматриваются лишь установившиеся (статические) режимы.Взаимодействие тока I в обмотке якоря с магнитным потоком Ф, создаваемым обмотками, расположенными на полюсах машины, приводит в соответствии с законом Ампера и возникновению электромагнитных сил, действующих на активные проводники обмотки и, следовательно, электромагнитного момента М = kФI(3.1)где k- конструктивный параметр машины.В движущихся с угловой скоростью в магнитном поле под действием момента М проводниках обмотки якоря в соответствии с законом Фарадея наводится ЭДС вращения E = kФ , (3.2)направленная в рассматриваемом случае встречно по отношению к вызвавшей движение причине - ЭДС источника питания U.
42.Характеристики и режимы работы двигателя постоянного тока смешанного возбуждения.
 Для
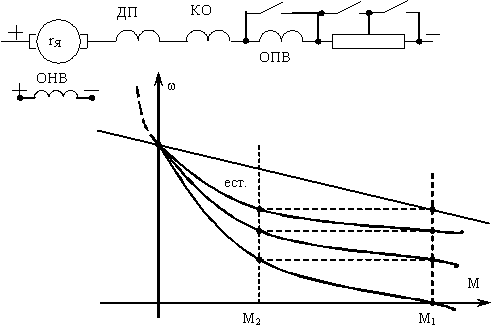
двигателей смешанного возбуждения
рекуперация энергии в сеть возможна,
но практически этот режим не используется,
так как механическая характеристика в
области малых нагрузок очень мягкая
(см. рис. 7.3). Поэтому нельзя получить
большие тормозные моменты (и генерировать
в сеть заметное количество энергии) при
реальных скоростях вращения электрической
машины.
Для
двигателей смешанного возбуждения
рекуперация энергии в сеть возможна,
но практически этот режим не используется,
так как механическая характеристика в
области малых нагрузок очень мягкая
(см. рис. 7.3). Поэтому нельзя получить
большие тормозные моменты (и генерировать
в сеть заметное количество энергии) при
реальных скоростях вращения электрической
машины.
43.Потери мощности и энергии в установившемся режиме работы электропривода.
В общем случае потери мощности и энергии в ЭП складываются из потерь в электродвигателе, механической передаче, силовом преобразователе и системе управления Основная доля потерь при этом выделяется в силовом канале электроприво
да — электродвигателе, силовом преобразователе и механической передаче.
Потери мощности и энергии в двигателе. Потребляемая двигателем электрическая мощность расходуется на выработку полезной механической мощности и на покрытие потерь, к которым относятся потери в обмотках двигателя, магнитопроводе и механические потери.
Потери в обмотках двигателя, называемые также электрическими потерями или потерями в меди, определяются протекающими по ним токами и активным сопротивлением электрических цепей.
Потери в магнитопроводе, называемые также потерями в стали, включают в себя потери на гистерезис и вихревые токи, вызванные перемагничиванием сердечников. К ним относятся и добавочные потери, вызванные зубчатой конструкцией сердечников.
Механические потери состоят из потерь в подшипниках, потерь на трение щеток о коллектор или контактные кольца и ветиляционные потери, определяемые трением частей двигателя о воздух или охлаждающую жидкость.
44.Потери мощности и энергии в переходных режимах работы электропривода.
Переходным режимом электропривода называется режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток. Правильный выбор мощности двигателя возможен во многих случаях только при учете переходных режимов. Особенно это справедливо для приводов повторно-кратковременного режима работы двигателя, когда время переходных процессовсоставляет значительную долю в общем времени работы.
45.Коэффициент мощности электропривода.КПД электропривода.
С ростом уровня номинальной мощности номинальный КПД растет, что объясняется уменьшением потерь мощности относительно полезной мощности двигателя.
КПД работающего двигателя зависит от развиваемой им полезной механической мощности на валу. При малых нагрузках КПД двигателя небольшой по мере увеличения нагрузки он растет. ЭП, подключенный к сети переменного тока, потребляет из нее активную Ра и реактивную Q мощности. Активная мощность
расходуется на полезную работу ЭП и покрытие потерь в нем, а реактивная мощность обеспечивает создание электромагнитных полей двигателя и других его элементов и непосредственно полезной работы не совершает.
Коэффициентом мощности характеризуется работа ЭП с двигателями переменного тока, а также ЭП постоянного тока, выполненного по системе «управляемый выпрямитель—двигатель постоянного тока».
46.Нагревание и охлаждение электродвигателей. Нагрузочные диаграммы.В процессе работы электродвигатель нагревается за счет потерь, возникающих в нем при преобразовании электрической энергии в механическую. Потери мощности в двигателе.Возрастание нагрузки на валу двигателя приводит к увеличению суммарных потерь мощности АР, а следовательно, и к повышению нагрева. Повышение температуры сверх номинальной приводит к быстрому «старению» (потере электрических свойств) изоляции, что, в свою очередь, сокращает срок службы двигателя.В связи с тем, что работающий двигатель охлаждается лучше, чем неработающий, т. е. Л>Я0, постоянная времени охлаждения больше постоянной времени нагрева. Постоянная времени нагрева небольших асинхронных двигателей мощностью до 10 кВт равна 20.30 мин. Постоянная времени охлаждения для двигателей средней мощности равна обычно 80. 150 мин.
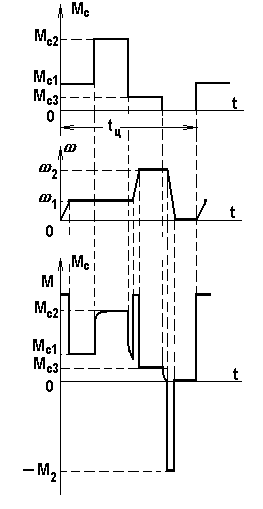
Нагрузочные диаграммы механизма, вообще говоря, могут иметь любой вид, однако всегда можно выделить цикл, т.е. промежуток времени tц, через который диаграмма повторяется. Если характер работы таков, что режимы воспроизводятся плохо (лифт, подъемный кран и т.п.), строят нагрузочные диаграммы для наиболее вероятного или наиболее тяжелого цикла.Следует особо подчеркнуть, что для обоснованного выбора двигателя требуемая нагрузочная диаграмма механизма должна быть известна. На рис. 2 в качестве примера приведены требуемые нагрузочная диаграмма и тахограмма некоторого механизма (верхние для графика).