

6. Определение показателей качества в системе по возмущающему воздействию с компенсатором и без него
Для построения переходной характеристики по возмущающему воздействию запишем передаточную функцию по возмущению:
С компенсатором
![]()
Расчет и построение данного переходного процесса выполняется в программе «СС», он показан на рис.10.
Определяем показатели качества системы:
1. Статическая ошибка:
![]() .
.
2. Время регулирования:
![]()
3. Перерегулирование:
![]()
Качество управления считается удовлетворительным, если перерегулирование не превышает 30-40%.
4. Колебательность:
![]()
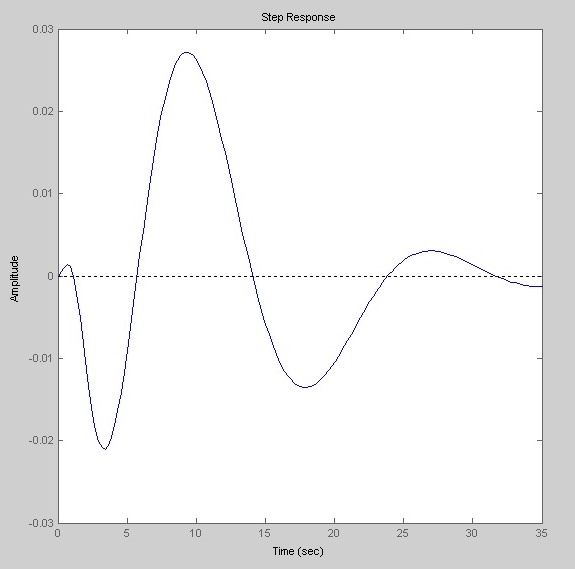
Рис. 10, Переходный процесс САУ по возмущающему воздействию с компенсатором
Без компенсатора

Расчет и построение данного переходного процесса выполняется в программе «СС», он показан на рис.11.
Определяем показатели качества системы:
1. Статическая ошибка:
.
2 . Время регулирования:
![]()
3. Перерегулирование:
![]()
Качество управления считается удовлетворительным, если перерегулирование не превышает 30-40%.
4. Колебательность:
![]()
5. Степень затухания:
![]()
Интенсивность затухания колебаний в
системе считается удовлетворительной,
если
![]() .
.
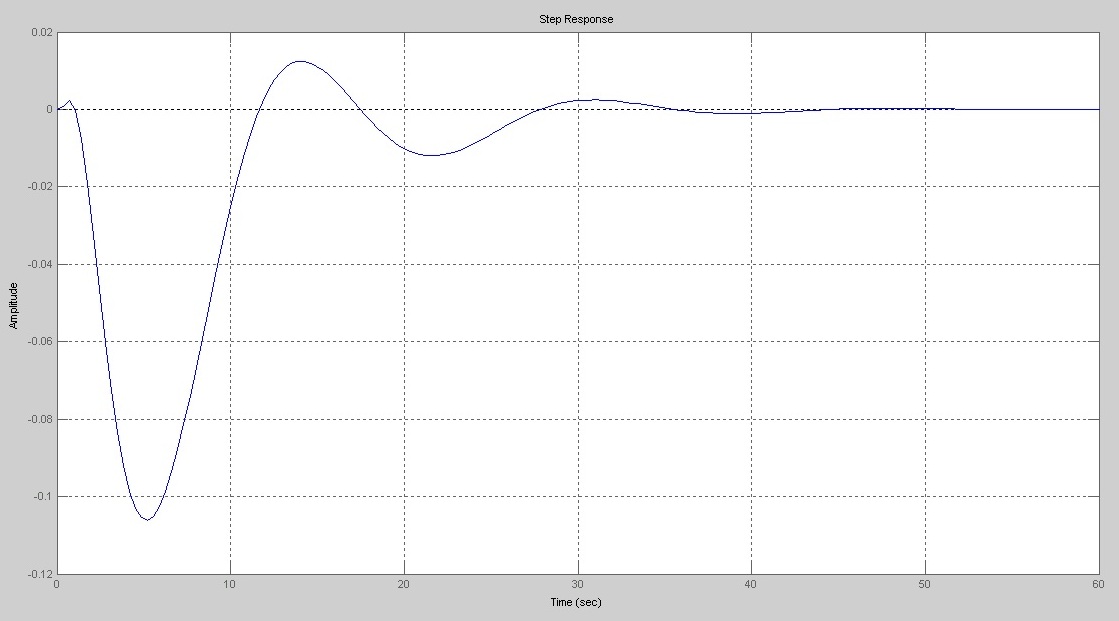
Рис. 11, Переходный процесс САУ по возмущающему воздействию без компенсатора
Вывод: Оценив переходные процессы по возмущающему воздействию, можно сделать вывод, что построенная система автоматического управления является работоспособной и имеет показатели качества на хорошем уровне.
g
ɛ
-
y
u
f
y
Рис.12 Структурная схема
комбинированной системы управления














![]()
![]()
![]()
![]()



7.Составление структурной схемы сау с нцу и запись алгоритма цифрового управления
В настоящее время, как правило, функции аналоговых автоматических регуляторов передаются управляющей микроЭВМ, т.е. осуществляется переход к подсистеме непосредственного цифрового управления (НЦУ). Одна микроЭВМ может обслужить несколько контуров управления, заменив десятки регуляторов, формируя управляющие воздействия в режиме реального разделения времени между отдельными контурами.
При разработке систем НЦУ приходится решать следующие задачи:
Выбор алгоритма управления (закона управления исполнительными механизмами);
Определение периода квантования (опроса датчиков, выдачи управляющих воздействий), входных и выходных сигналов;
Выбор типа контроллера.
На экономическую эффективность системы НЦУ в основном влияют решение первых двух задач. Первая задача определяет точность управления параметрами объектами и машинное время, затрачиваемое на каждый контур НЦУ при одном периоде квантования. От решения второй задачи зависит загрузка ЭВМ операциями управления.
Одним из ценнейших функциональных преимуществ НЦУ является возможность точной реализации алгоритмов управления практически любой сложности. Однако в настоящее время большинство систем НЦУ являются цифровыми копиями традиционных аналоговых систем, поэтому практически все реальные системы НЦУ базируются на применении классических ПИ- и ПИД-алгоритмов управления.
В непрерывной форме ПИ-алгоритм:
![]()
Представим цифровой ПИ-алгоритм в форме
позиционного алгоритма, для которого
характерно, что регулятор НЦУ в каждый
момент времени
![]() должен выполнять расчёт выходной
величины управляющего воздействия, не
учитывая результаты расчетов предыдущего
момента времени
должен выполнять расчёт выходной
величины управляющего воздействия, не
учитывая результаты расчетов предыдущего
момента времени
![]() .
В дискретной форме алгоритм имеет вид:
.
В дискретной форме алгоритм имеет вид:
![]()