

Министерство образования и науки РФ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ»
Кафедра механизации, автоматизации и энергоснабжения строительства
Курсовой проект
на тему
Структурный анализ и синтез механизма
Выполнил: студент 1 курса
Гр. БЗТ-25
Малбасарова Н.Е.
Проверил:
к.т.н. Ленивцев А.Г.
САМАРА 2012 г.
Содержание
1. Структурный и кинематический анализ механизма…………………….3
1.1Структурный анализ и синтез механизма……………………………….3
1.2 Графический метод планов положений, скоростей и ускорений……..4
1.3 Метод кинематических диаграмм……………………………………….8
2. Проектирование и анализ зубчатых механизмов……………………….12
2.1 Параметры зубчатого зацепления………………………………………12
2.2. Порядок построения зубчатого зацепления…………………………...13
Список использованной литературы……………………………………….15
1. Структурный и кинематический анализ механизма
1.1 Структурный анализ и синтез механизма.
Под структурным анализом механизма понимается определение количества звеньев и кинематических пар, определение степени подвижности, статистической определимости и класса механизма.
Структурным синтезом механизма называется проектирование структурной схемы механизма, которая состоит из неподвижного и подвижных звеньев и кинематических пар.
С труктурной
называется схема, указывающая стойку,
подвижные звенья, виды кинематических
пар и их взаимное расположение.
труктурной
называется схема, указывающая стойку,
подвижные звенья, виды кинематических
пар и их взаимное расположение.
На структурных схемах размеры звеньев не указываются. При указании размеров (длин) звеньев, координат неподвижных опор и масштаба построения схема становится кинематической.
Наиболее удобным методом получения структурной схемы является метод Ассура, по которому присоединяются структурные группы к стойке и к начальному (ведущему) звену или к основному механизму.
Начальное звено присоединено к стойке обычно шарниром или поступательной парой (рис 1.5) образует механизм 1 класса. Имеет одну степень подвижности W = 1.

Рисунок 1.5. Начальное звено.
Структурной группой Ассура называется кинематическая цепь, которая в случае ее присоединения элементами внешних пар к стойке получает нулевую степень подвижности, т.е. образует ферму.
Структурная формула группы Ассура W =3n -2p5 = 0 ; p5 = 3n/2
Возможны группы следующие составов
n = 2 ; 4 ; 6
p5= 3 ; 6 ; 9
Простейшая структурная группа 2 класса, 2 порядка состоит из двух звеньев и трех кинематических пар. Возможны 5 видов простейших групп в зависимости от сочетания вращательных (В) и поступательных (П) пар.
В группах Ассура различают кинематические пары внутренние и внешние. Число внешних кинематических пар (вернее их элементов), которыми группа присоединяется к другим звеньям механизма, называют порядком (числом поводков) группы. Наиболее простые структурные группы с п = 2 и p5 = 3
Класс структурной группы определяется числом внутренних кинематичеcких пар, образующих наиболее сложный замкнутый контур группы.
При структурном анализе проводится расчленение механизма на структурные группы и начальные механизмы в порядке, обратном структурному синтезу. Из конца кинематической цепи механизма, принимая за её начало входное звено 1 последовательно отсоединяются группы II (4,5) и II (2,3) до тех пор, пока не останется ведущее звено на стойке - I (1,6):
I (1,6) II (2,3) II (4,5) (1.6)
Структурный анализ выполняется с целью правильного выбора методики кинематического и силового расчета механизма.
n3= n1/Uобщ = 55/2 = 27,5 об/мин
U12=3000/55=55,54 ; U34 = 36/12 = 3
w = Пn/30 = 3,14*27,5/30 = 2,88 1/c
1.2 Графический метод планов положений, скоростей и ускорений
Основные задачи кинематического анализа механизма состоят в определении перемещений, скоростей и ускорений его ведомых звеньев по заданному закону движения входного (ведущего) звена.
Среди графических методов наиболее распространены:
а) метод кинематических диаграмм, отражающих законы движения в виде графиков функций по времени: перемещения точки Sk = S(t), ее скорости Vk = V(t) и ускорения ak = a(t);
б) метод планов положений, скоростей и ускорений.
Графические методы отличаются наглядностью, поэтому особенно приемлемы в учебных задачах, но менее точны. Однако степень точности достаточна для решения многих инженерных задач.
При графическом методе кинематического анализа механизмов длин звеньев, перемещения точек, их скорости и ускорения изображают в масштабах e, s, v, a.
Планом положений механизма называется графическое изображение взаимного расположения звеньев, соответствующее выбранному моменту времени движения.
П остроим
план положений кривошипно–шатунного
механизма (рисунок 1.7), в масштабе e
= lАВ
/ АВ (м/мм).
остроим
план положений кривошипно–шатунного
механизма (рисунок 1.7), в масштабе e
= lАВ
/ АВ (м/мм).
Рисунок 1.7. План положений механизма
Начальным или крайним называют положение звена, c которого начинается отсчет его движения в одном направлении.
Скорости точек и звеньев механизма определяются построением планов скоростей. Метод основан на графическом решении векторных уравнений скоростей.
Планом скоростей называется построенный в масштабе v (м/с/мм) чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в рассматриваемый момент времени.
Для построения плана скоростей должны быть известны кинематическая схема, формула строения механизма и закон движения ведущего звена.
В качестве примера рассмотрим движение кривошипно–ползунного механизма (рис. 1.8). Для заданного положения 1 механизма известны угловые скорости 1 и ускорение 1 ведущего звена. Требуется найти линейные скорости точек А, В, S2 и угловую скорость звена 2.
Построение плана скоростей начинается с анализа движения входного звена – кривошипа 1 с переходом к анализу структурных групп по последовательности их присоединения. По формуле строения механизма I(1,4) II (2,3) начнем с определения скорости точки А звена 1, затем перейдем к определению скоростей точек В, S2 и других точек присоединенной структурной группы 2 класса, состоящей из звеньев 2 и 3.
Скорость точки А кривошипа 1 можно описать уравнениями:
VA1 =VO1 +VAO1=2,88* 0,25=0,72; VA1= VAO1=0,72 (1.8)
Так как точка О1 неподвижна, то V01 = О. Вектор VAO1 направлен перпендикулярно кривошипу О1 А, в направлении его вращения. Величина скорости (модуль вектора) точки А равна:
VА = VАО1 = lO1A . 1 (1.9)
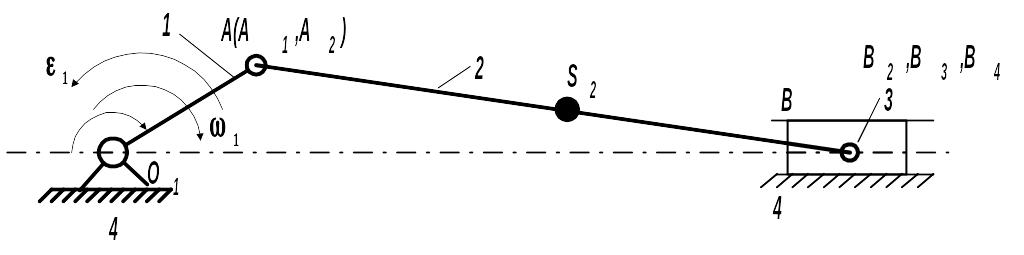
Рисунок 1.8. Кривошипно-ползунный механизм.
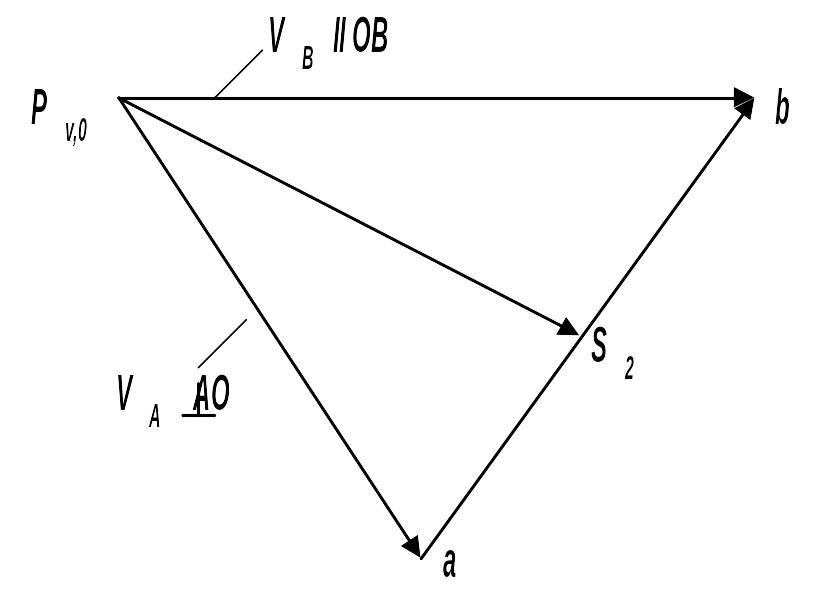
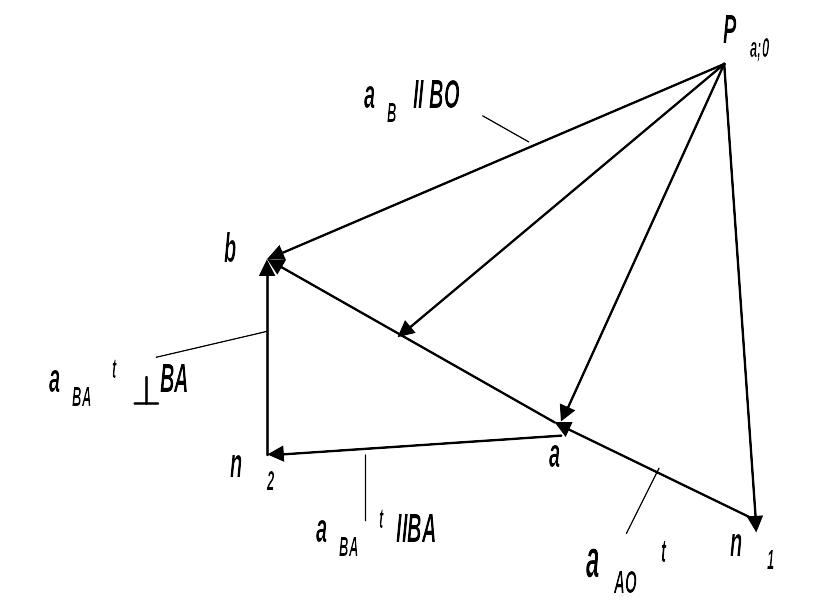
Рисунок 1.9. План скоростей и ускорений.
Из произвольного полюса pV, выбранного вблизи схемы механизма, строим векторы по уравнению (1.7), принимая длину отрезка pVа = 30…100 мм. Тогда масштаб плана скоростей
v = VA / pVа =0,72/ 72=0,01 (м/с/ мм). (1.10)
Переходя к анализу структурной группы II (2,3), замечаем, что скорости точек А 1-го и 2-го звеньев одинаковы: VA2 =VA1 =VA .
Точка В2 , принадлежащая звену 2, рассматривается в относительном движении вокруг точки А, а В3, принадлежащая звену 3, в движении относительно стойки 4. Поэтому запишутся уравнения :
VB2 =VA2 +VBA , (1.11)
1 VВ2 |
0 |
ω |
0 |
2 VВ2 |
0,655 |
ω |
0,262 |
3 VВ2 |
0,438 |
ω |
0,1752 |
4 VВ2 |
0,72 |
ω |
0,288 |
5 VВ2 |
0,432 |
ω |
0,1728 |
6 VВ2 |
0,658 |
ω |
0,2632 |
7 VВ2 |
0 |
ω |
0 |
8 VВ2 |
0,658 |
ω |
0,2632 |
9 VВ2 |
0,432 |
ω |
0,1728 |
10 VВ2 |
0,72 |
ω |
0,288 |
11 VВ2 |
0,438 |
ω |
0,1752 |
12 VВ2 |
0,655 |
ω |
0,262 |
Так какVB =VВ2 =VВ3 , то VA +V ВА =VB4 +VB3B4 (1.12)
ВекторVBА ВА, а VB3В4 ОВ. По уравнению (1.11) строим план скоростей. Из ранее принятого полюса pV строим левую и правую части уравнения в виде отрезков, соответствующих скоростям точек VА , из точки а проводим линию, перпендикулярную АВ в направлении скоростиVВА . При построении правой части уравнения в полюсе pV отмечаем точку b4 , так как VВ4 = 0, из нее проводим линию, параллельную ОВ в направлении VВ3В4. В пересечении указанных линий находим точку b. Вектором pv b изображаем абсолютную скорость VB точки В, а вектором ab – скорость VВА. Значения действительных скоростей находим по формулам,
VB = v . pvb и VBA = v . ab (1.13)
Для определения скорости точки S2 (центра масс звена 2) можно воспользоваться известной из теоретической механики теоремой подобия скоростей. Отрезки прямых линий, соединяющих точки на схеме звена механизма, и отрезки, соединяющие концы векторов относительных скоростей, образуют подобные и сходственно расположенные фигуры. Направление обхода aS2b такое же как и фигуры АS2В.
aS2b
АS2В.
as2
=ab![]() .
(1.14)
.
(1.14)
Отложив отрезок as2 на отрезке ab плана скоростей и соединив точку S2 с полюсом, построим вектор pvS2 абсолютной скорости точки S2. Находим значение скорости точки S2
VS2 = v . pv S2 . (1.15)
Угловая скорость звена 2 равна,
2= VВА / lBA = v . ab / lBA. (1.16)
Направление 2 определяется по вектору ab скорости VВА . Оно против часовой стрелки в данном положении механизма.
Ускорения точек и звеньев механизма определяются построением планов ускорений.
Планом ускорений механизма называется чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в рассматриваемый момент времени.
Для построения плана ускорений должны быть известны кинематическая схема, формула строения механизма, закон движения ведущего звена и план скоростей. Рассмотрим движение кривошипно–ползунного механизма (рис. 1.8), где построен план скоростей.
Решение задачи выполняется на основе правила: абсолютное ускорение любой точки звена при плоском движении твердого тела равно геометрической сумме двух ускорений: ускоренияae в поступательном переносном движении и ускорения ar во вращательном относительном движении:
aa =ae +ar =ae +arn +ar , (1.17)
гдеarn иar - нормальное ускорение в относительном движении, направленное по радиусу вращения к центру кривизны траектории, и касательное ускорение, направленное перпендикулярно радиусу вращения.
По формуле строения механизма I (1,4) II (2,3) построение плана ускорений начнем с определения ускорения точки А входного звена 1, затем перейдем к определению ускорений точек В и S2 и построению векторов ускорений звеньев группы II (2,3).
Абсолютное ускорение точки А1 по уравнению (11) равно
aA1 =a0 +aA10n +aA10 , (1.18)
гдеa0 – переносное ускорение точки О, равное нулю, так как точка неподвижна;
aA10n - нормальное (центростремительное) ускорение точки А1 относительно точки О, направленное к центру О, т.е. II АО;
aA10n = 12 . lAO =2,882*0,25 = 2,07 м/с2 (1.19)
aA10 - касательное (тангенциальное) ускорение точки А1 относительно точки О, направленное перпендикулярно АО, в сторону 1 ,
так как aA10 =1. lAO (1.20)
Из произвольного полюса ра (рисунок 1.9), выбранного вблизи схемы механизма, строим векторы по уравнению (1.18), принимая длину отрезка раn1 = 30…100 мм и определив масштаб плана ускорений:
а = aA10n / раn1 = м/с2 . мм. (1.21)
Построив из точки О, совпадающей с ра, так как а0 = 0, отрезок оn1 ускорения aA10n , проведем отрезок n1а = aA0 / а касательное ускорение aA0 . Соединяя полюс ра с точкой а, находим полное ускорение точки А1 (отрезок раа):
аА =а . раа . (1.22)
Переходя к анализу структурной группы II (2,3), запишем уравнения ускорения точки В:
aВ =aа +aВА ; aВ =aВ4 +aВ3В4 ; (1.23)
aA +aВАn +aВА =aВ4 +aВ3В4 . (1.24)
Значение нормальной составляющей относительного ускорения определяется по формуле:
aВАn = 22 . lВА.= 1,632 * 0,4 = 1,06 м/с2 (1.25)
Вектор aВАn направлен по АВ к центру вращения (точке А) и откладывается из точки а плана. Длина отрезка an2 = aВАn / а . НаправлениеaВА будет проходить через конец вектора aВАn и перпендикулярно ВА. При построении правой части уравнения (17) отмечаем в полюсе ра точку b4. Так как aВ4= 0, из нее проводим линию, параллельную ОВ в направленииaВ3В4. Пересечение этой линии с перпендикуляром к ВА определит положение точки b на плане, а следовательно, величину ускорения
аВ = а . раb . (1.26)
Вектор аb изображает полное относительное ускорение аВА .
Угловое ускорение звена 2 находим из уравнения
![]() .
(1.27)
.
(1.27)
Перенеся векторn2b в точку В и рассматривая действие вектора относительно точки А, находим направление 2 , против часовой стрелки в данном случае.
По подобию фигур aS2b АS2В определяем величину абсолютного ускорения точки S2 , как при определенииVS2 . Отрезок аs2 = ab (AS2 / AB) отложим на отрезке аb, соединим точку S2 с полюсом ра , тогда
as2 = а . ра S2 . (1.28)
Для кинематического анализа механизма за весь цикл (полный оборот входного звена) выполняется построение планов скоростей и ускорений в 12 последовательных положениях входного и других звеньев.