

Динамические параметры ацп.
Основными динамическими параметрами АЦП являются время или максимальная частота преобразования.
Время преобразования tпр - время от момента изменения сигнала на входе до появления на его выходе соответствующего устойчивого кода.
Максимальная частота преобразования fпрmах - наибольшая частота дискретизации, при которой выбранные параметры АЦП соответствуют нормам.
Апертурное время tа - время между моментом выборки (отсчета) мгновенного значения и моментом получения его цифрового эквивалента.
Апертурная погрешность Uа определяется приращением входного изменяющегося во времени сигнала АЦП за время преобразования.
Двухтактные интегрирующие преобразователи.
Был изобретен в России. Основан на сравнении площадей.
Преобразуют площадь в частоту или интервал времени. Так как преобразуется площадь, то импульсные и периодические помехи мало влияют на результаты.
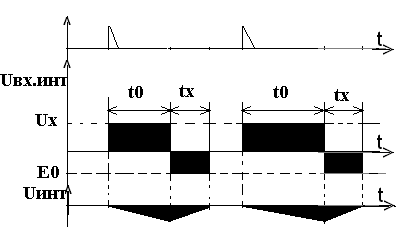
Идея ДИП:
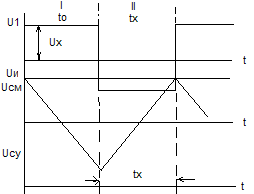
1 такт – в течение образцового интервала времени интегрируется вх. сигнал Ux, в результате получаем полщадь Uхср*t0.
2 такт – интегрируем образцовый сигнал E0 в течение времени tx, чтобы площади были равны:
Получил очень большое распространение, так как он очень точный.
Схема двухтактного преобразователя.
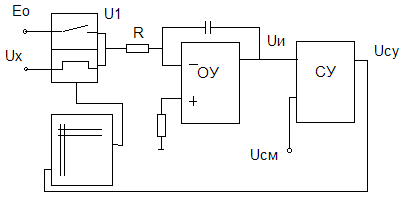
Уравнение преобразования:
1 такт k1-замкнут, k2-разомкнут
2 такт k1- разомкнут, k2- замкнут
Общее уравнение:



Параметры R и C не входят в погрешность интегратора.

Смещение нуля нужно для того чтобы увеличить диапазон измерений (от – до +, а не от 0 до +, что увеличивает скорость измерения, а следовательно можно успеть “проскочить” больше импульсов).
Для борьбы с шумами нужно делать несколько раз измерения, а затем брать среднее.
Переходя к кодированию:
Uсм не влияет на погрешность преобразования
Достоинства
простота схемы
Высокий уровень помехоустойчивости
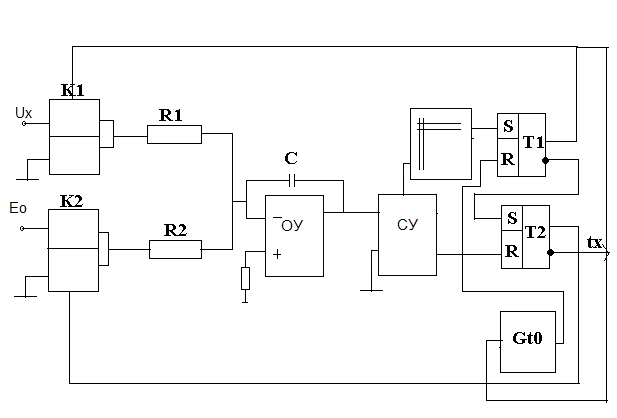
По импульсу запуска Т1=1, К1 вкл., Gt0 запуск i. На интегратор поступает Ux.
когда t0 заканчивается Gt0 ->1, t1 ->0, t2 ->1. На интергатор поступает Е0.
Напряжение на интеграторе достигает , Т2 ->0, конец цикла.
Уравнение преобразования:
1 такт

2 такт
 решая
уравнение получим,
решая
уравнение получим,
t0=2n*T0,
tx/T0=Nx,
Следовательно
 из-за чего отпадают требования к
стабильности частоты.
из-за чего отпадают требования к
стабильности частоты.
Достоинства:
Минимум инструментальных погрешностей
Недостатки:
Теряется часть информации о сигнале.
Погрешность:
От дрейфа нуля по току и напряжению - в современных ОУ малые доли процентов

От нелинейности интегратора - в современных ОУ малые доли процентов

 АЦП.
АЦП.
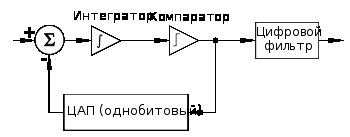
Сигма-дельта-АЦП (называемые также дельта-сигма АЦП) производит аналого-цифровое преобразование с частотой дискретизации, во много раз превышающей требуемую и путём фильтрации оставляет в сигнале только нужную спектральную полосу.
Сигма-дельта модуляция – способ представления сигнала, использующий принципы избыточной дискретизации и формирования шума квантования. За счет избыточной дискретизации снижается уровень шума в полосе, содержащей полезный сигнал. За счет формовки шума этот уровень становится ещё ниже, правда, за счет увеличения уровня шума за пределами рабочей полосы. Таким образом, сигма-дельта модулятор — это система, обеспечивающая оцифровку сигнала с заданными характеристиками в рабочей полосе.
Чаще всего сигма-дельта модуляция применяется в микросхемах АЦП и ЦАП звукового диапазона частот. Это обусловлено сравнительно небольшими требованиями таких систем к диапазону частот и значительными требованиями — к уровню шумов и динамическому диапазону системы.