

6.48)Немає 7.56) Мета і послідовність енергокінематичного розрахунку привода машини.
1.1 Позначення параметрів та елементів привода
Перед визначенням параметрів накреслимо службову кінематичну схему (рис. 1.1). Вхідний вал привода, вал електродвигуна позначаємо цифрою 1. На схемі редуктора цифрами 2, 3 позначаємо швидкохідний, і тихохідний вали та їх параметри.
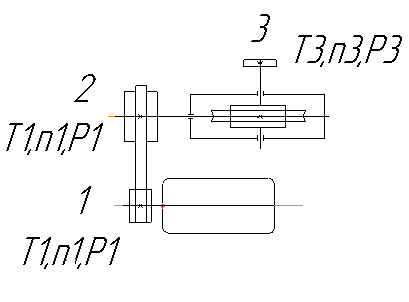
Рисунок 1.1 – Кінематична схема приводу.
З метою зручності введення розрахунків параметрам елементів передачі, що розглядається, надаються індекси ведучого "1" та веденого – "2". Для індексації елементів передач використаємо такі позначення:
"п" –пасова передача;
"ч" – черв’ячна передача;
"р" – редуктор;
"пк" – підшипник кочення.
1.2 Визначення потрібної потужності і вибір електродвигуна привода
При довгостроковому постійному або незначному змінному навантаженні, яке притаманне компресорам, конвейєрам, транспортерам та іншим механізмам, розрахункова потужність електродвигуна привода визначається через потужність на вихідному валу привода, кВт:
 Вт
Вт
де Р3 – потужність на вихідному валу привода, Вт;
η1 – коефіцієнт корисної дії пасової передачі.
η2 – коефіцієнт корисної дії черв’ячнної передачі.
ηпк коефіцієнт корисної дії підшипників.
Визначимо коефіцієнт корисної дії привода:

де ηП – коефіцієнт корисної дії пасової передачі, ηП=0,97;
ηЧ – коефіцієнт корисної дії черв’ячної передачі, ηК=0,8;
ηПК – коефіцієнт корисної дії однієї пари підшипників кочення, ηПК=0,99;
k – число пар підшипників, k=2;

Для приводів конвеєра та інших механізмів широко використовуються двигуни серії 4А виконання ІМ1081, ІМ2081 за ГОСТ 19523-81 потужністю від 0,55 до 30 кВт та синхронними частотами обертання ротора від 750 до 3000 хв-1.
З довідників вибираємо двигун ближчої меншої по ряду потужності РД у порівнянні з розрахунковою. Обираємо двигун 4А132М4/1445/2 з потужністю 7,5 кВт з синхронною частотою обертання 1500 хв-1 та перевіряємо його на перевантаження:

Маючи потужність РД та синхронну частоту обертання обираємо з довідників типорозмір двигуна. Запишемо його габаритні розміри (таблиця 1.1) та виконаємо ескіз двигуна виконанням ІМ1081.
Таблиця 1.1 – Габаритні розміри двигуна .
Тип двигуна |
Число полюсів |
Виконання ІМ1081 |
||||||||||||
d30 |
l1 |
l30 |
d1 |
b1 |
h1 |
l10 |
l31 |
d10 |
b10 |
h |
h10 |
h31 |
||
4A 132S |
4 |
302 |
80 |
480 |
38 |
10 |
8 |
140 |
89 |
12 |
216 |
132 |
13 |
350 |
1.3 Визначення загального передаточного числа привода та його розподіл по ступеням
Визначимо загальне передаточне число привода U':

де n3 – частота обертання вихідного валу, хв-1;
 – асинхрона
частота обертання валу двигуна, хв-1;
– асинхрона
частота обертання валу двигуна, хв-1;
Розподіл U' з урахуванням можливих значень передаточних чисел різних передач треба вести додержуючись основних критеріїв: матеріаломісткість, вартість, довговічність та габаритні розміри привода. Всі ці критерії залежать від матеріалів та хіміко-термічної обробки зубчастих коліс, рівноміцності деталей передач, раціонального визначення способу змащування, допустимого недовантаження передач.
Визначимо передаточне число черв’ячної :

де U1
- попередньо вибране передаточне число
пасової передачі, =2,5, попередньо вибране
передаточне число черв’ячної
передачі .
=2,5, попередньо вибране
передаточне число черв’ячної
передачі .
1.4 Визначення частоти обертання валів привода, потужностей та обертових моментів, що передаються валами
Розрахуємо дійсні частоти обертання валів, хв-1:


Розрахуємо потужності на валах, Вт:

 Вт
Вт

 Вт
Вт
Розрахуємо обертові моменти на валах, Нм:





 Нм
Нм
1.5 Підсумкові дані розрахунку
Параметри визначеного для привода електродвигуна:
тип – 4А 132S4/1455/2;
потужність – Р1=7.5 кВт;
частота обертання
 ;
;