

Построение положений механизма.
Для построения кинематической схемы
исследуемого механизма в различных
положениях выбираем масштабный
коэффициент длины![]() ,
который определяется как
,
который определяется как
![]() =
=
![]() [
[![]() ]
]
где - действительный радиус кривошипа в м;
АВ – радиус кривошипа на чертеже в мм.
Масштабный коэффициент l следует выбрать таким образом, чтобы схема механизма занимала примерно 1/5 часть листа и чтобы этот коэффициент был удобен для расчетов. Например могут быть использованы следующие значения :
0,001 м/мм; 0,0005 м/мм; 0,002 м/мм; 0,0025 м/мм.
Все требуемые положения механизма удобно строить на одном чертеже (т.е. с одним центром вращения кривошипа). На рис. 20 механизм показан в четырех положениях. Каждое положение обозначено соответствующим индексом:
1 – соответствует верхнему крайнему положению ползуна 5 (ведомого
звена),
П – соответствует нижнему крайнему положению ползуна 5,
Ш – соответствует рабочему ходу ползуна 5 ,
1У – соответствует холостому ходу ползуна 5.
Крайние положения исследуемого рычажного механизма с качающейся кулисой определяем по крайним положениям кулисы 3 , в которых кулиса перпендикулярна кривошипу 1 .
Рабочему ходу ползуна соответствует угол поворота кривошипа р.х. , холостому ходу - х.х.
При выборе расчетного рабочего положения
используем диаграмму сил F
= F(Sе),
построенную на ходе ползуна 5 . В
металлорежущих станках процесс резания
происходит только на части рабочего
хода, соответствующей длине обрабатываемой
детали
![]() .
Поэтому выбираем положение кривошипа
на угле поворота р.х.
, соответствующем рабочему ходу,
когда ползун 5 (точка Е ) внутри отрезка
.
.
Поэтому выбираем положение кривошипа
на угле поворота р.х.
, соответствующем рабочему ходу,
когда ползун 5 (точка Е ) внутри отрезка
.
При выборе положения механизма, соответствующего холостому ходу ползуна, берем любое положение кривошипа на угле его поворота х.х.
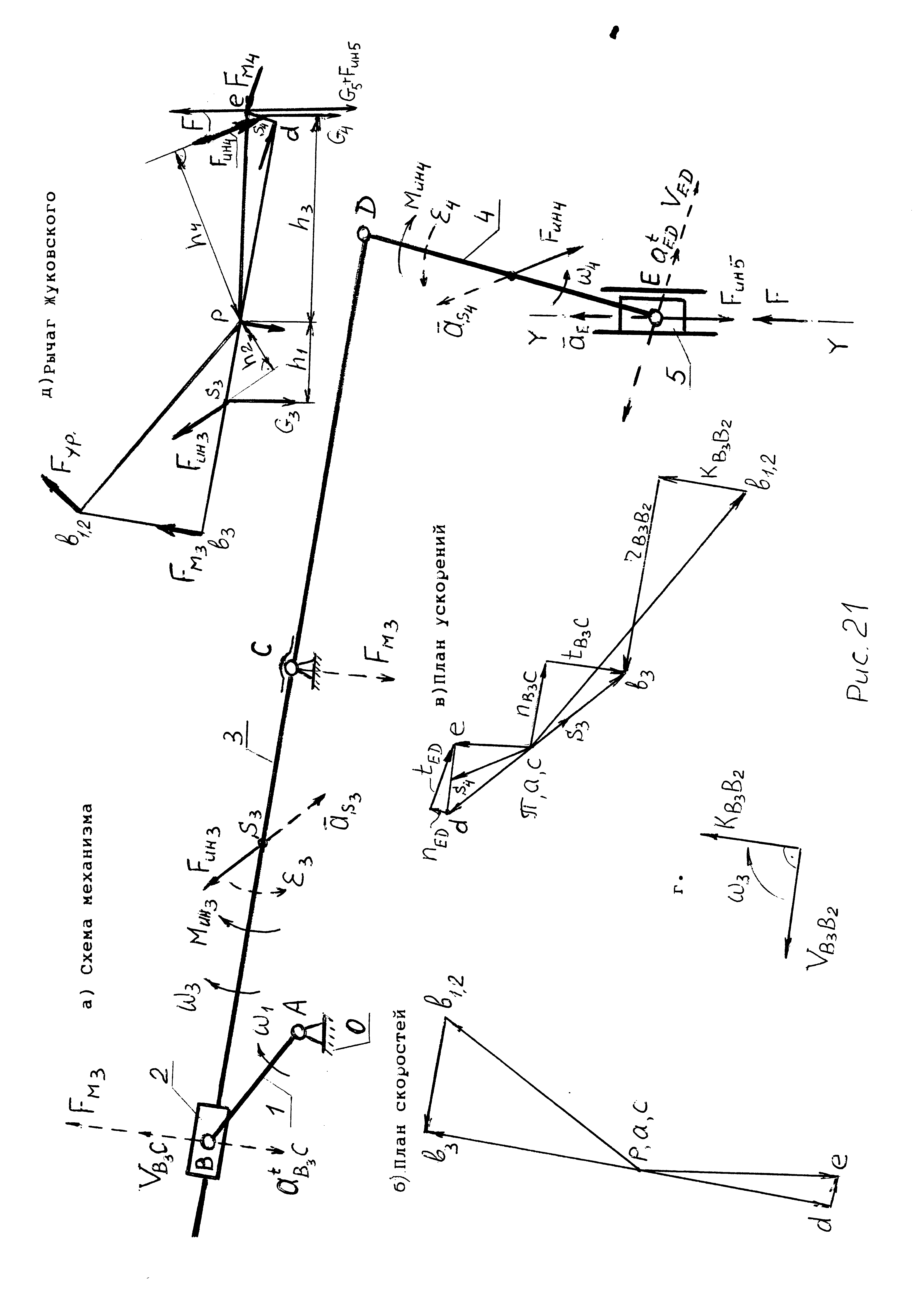
6.3. Построение планов скоростей и ускорений.
Планы скоростей и ускорений требуется построить для трех положений механизма: для положений на рабочем и холостом ходах и для одного из крайних положений. Рассмотрим построение плана скоростей и ускорений для рабочего положения механизма.
На рис 21,а (чтобы лучше были видны построения) вынесено отдельное положение, соответствующее рабочему ходу.
Последовательность кинематического исследования определена последовательностью образования механизма: начальное звено 1 и стойка 0
двухповодковая группа Ассура 3 вида, состоящая из звеньев 2 и 3 , двухповодковая группа Ассура 2 вида, состоящая из звеньев 4 и 5 .
Для
начального звена 1 угловая скорость
постоянна и равна 1
=
![]() [с-1
],
где n
[мин-1]
– заданная частота
вращения кривошипа.
[с-1
],
где n
[мин-1]
– заданная частота
вращения кривошипа.
Скорость точки В1 начального звена равна
![]()
![]() ,
,
вектор
скорости направлен перпендикулярно
звену АВ
в сторону, соответствующую направлению
угловой скорости
![]() .
.
На
плане скоростей (рис. 21, б) скорость точки
В1
изображаем отрезком
![]() .
Масштабный коэффициент плана скоростей
.
Масштабный коэффициент плана скоростей
![]()
![]() .
.
На
листе проекта отрезок
рекомендуется принять порядка 50…70 мм,
но так, чтобы
![]() был удобным для расчетов. Например, если
был удобным для расчетов. Например, если
![]() м/с, то
удобно взять равным 76 мм, тогда
м/с, то
удобно взять равным 76 мм, тогда
![]()
![]() ,
т.к. звенья 1 и 2 связаны вращательной
кинематической парой, а
,
т.к. звенья 1 и 2 связаны вращательной
кинематической парой, а
![]() ,
т.к. звенья 2 и 3 связаны поступательной
кинематической парой. Для точки В3
согласно II-ому
способу разложения движения (§3):
,
т.к. звенья 2 и 3 связаны поступательной
кинематической парой. Для точки В3
согласно II-ому
способу разложения движения (§3):
_ _ _
![]() ,
,
где
![]()
![]() .
Поэтому через точку в1,2
проводим прямую, параллельную ВС.
Согласно первому способу разложения
движения:
.
Поэтому через точку в1,2
проводим прямую, параллельную ВС.
Согласно первому способу разложения
движения:
_ _ _
![]() ,
,
где
![]() .
Поэтому через точку с
проводим прямую,
перпендикулярную ВС.
.
Поэтому через точку с
проводим прямую,
перпендикулярную ВС.
Точка
пересечения этих прямых и есть точка
![]() (стрелки ставим к этой точке).
(стрелки ставим к этой точке).
На
схеме механизма точка D
лежит на продолжении отрезка ВС
звена 3. Следовательно и на плане скоростей
точка d
будет лежать на продолжении отрезка
![]() в соответствии с теоремой о подобии.
Отрезок dc
определяем из пропорции
в соответствии с теоремой о подобии.
Отрезок dc
определяем из пропорции
![]()
![]()
![]() или
или
![]() т.к. точка С
на плане совпадает с полюсом р.
т.к. точка С
на плане совпадает с полюсом р.
Далее переходим ко второй группе Ассура, включающей звенья 4 и 5. Для точки Е, согласно I-ому способу разложения движения
![]() ,
,
где
VE
// xx,
т.к. точка Е вместе с пятым звеном
движется поступательно по горизонтали,
а VED![]() ED.
Поэтому через полюс р
проводим прямую
параллельную х-х,
т.к. все абсолютные скорости выходят из
полюса, а через точку d
проводим прямую, перпендикулярную ED.
Точка пересечения этих прямых есть
точка е
(стрелки ставим к этой точке).
ED.
Поэтому через полюс р
проводим прямую
параллельную х-х,
т.к. все абсолютные скорости выходят из
полюса, а через точку d
проводим прямую, перпендикулярную ED.
Точка пересечения этих прямых есть
точка е
(стрелки ставим к этой точке).
Пользуясь построенным планом скоростей, можно определить угловые скорости звеньев:
![]() ,
,
![]() .
.
_
Для
определения направления
![]() переносим вектор скорости
переносим вектор скорости
![]() в точку В
на схеме механизма и рассматриваем
движение точки В
относительно
в точку В
на схеме механизма и рассматриваем
движение точки В
относительно
точки
С в
направлении скорости
.
В данном положении механизма угловая
скорость
направлена по часовой стрелке. Для
определения направления
![]() переносим вектор относительной скорости
переносим вектор относительной скорости
![]() в точку Е и рассматриваем движение точки
Е
относительно точки D.
В данном положении механизма
направлена против часовой стрелки.
в точку Е и рассматриваем движение точки
Е
относительно точки D.
В данном положении механизма
направлена против часовой стрелки.
Переходим
к построению плана ускорений. Ускорение
точки В1
равно нормальному ускорению при вращении
точки В
вокруг точки А
![]() ,
т.к.
,
т.к.
![]() и направлено к центру вращения (от В
к А):
и направлено к центру вращения (от В
к А):
![]()
![]() .
.
На
плане ускорений (рис. 21, в) выбираем
отрезок
![]() порядка
50…70 мм из условия, чтобы масштабный
коэффициент плана ускорений получился
величиной, удобной для расчета:
порядка
50…70 мм из условия, чтобы масштабный
коэффициент плана ускорений получился
величиной, удобной для расчета:
![]()
![]() .
.
Векторные равенства для нахождения ускорения точки В3 имеют вид:
_ _ _ _
![]()
_ _ _ _
![]()
![]() .
.
от В
к С
![]()
Кориолисово ускорение, вернее отрезок, изображающий его на плане ускорений, определяем по формуле:
![]()
![]() ,
,
где
![]() и
и
![]() - отрезки с плана скоростей, (ВС)
– отрезок со схемы механизма,
- отрезки с плана скоростей, (ВС)
– отрезок со схемы механизма,
![]() .
.
Чтобы
определить направление
![]() ,
нужно отрезок
,
нужно отрезок
![]() ,
изображающий скорость
,
изображающий скорость
![]() ,
повернуть в сторону
на 900
(рис. 21, г).
,
повернуть в сторону
на 900
(рис. 21, г).
Нормальное
ускорение при вращении точки В3
относительно точки С
![]() направлено по звену ВС
от точки В
к точке С,
а отрезок, его изображающий, равен
направлено по звену ВС
от точки В
к точке С,
а отрезок, его изображающий, равен
![]() .
.
Графическое решение векторных равенств показано на рис. 21в.
Ускорение точки D кулисы 3 определяем согласно теореме о подобии пропорциональным делением одноименных отрезков на схеме механизма и на плане ускорений.
![]() ;
;
![]() .
.
Далее записываем векторное равенство для следующей 2ПГ 2-го вида, включающей звенья 4 и 5:
_ _ _ _
![]()
// уу от Е к D ED
Отрезок
![]() ,
изображающий на плане ускорений
нормальное ускорение при вращении
точки Е
вокруг точки D,
равен
,
изображающий на плане ускорений
нормальное ускорение при вращении
точки Е
вокруг точки D,
равен
![]() .
.
Необходимые построения показаны на рис. 21,в.
Пользуясь построенным планом ускорений, определим угловые ускорения звеньев:
 ;
;
![]() .
.
Для
определения направления углового
ускорения звена 3 переносим с плана
ускорений вектор тангенциального
ускорения
![]()
![]() ,
(направленный отрезок
,
(направленный отрезок
![]() )
в точку В
механизма. Угловое ускорение направлено
против часовой стрелки.
)
в точку В
механизма. Угловое ускорение направлено
против часовой стрелки.
Для
определения направления углового
ускорения звена 4 переносим с плана
ускорений вектор тангенциального
ускорения
![]() в точку Е
механизма (вращение относительно точки
D).
Угловое ускорение
в точку Е
механизма (вращение относительно точки
D).
Угловое ускорение
![]() направлено
против часовой стрелки (рис. 21, а).
направлено
против часовой стрелки (рис. 21, а).
Аналогично
должны быть построены планы скоростей
и ускорений для положений IV
и I
(или II).
При этом используются те же векторные
равенства и желательно использовать
те же масштабные коэффициенты
![]() Результаты повторяющихся расчетов
могут быть приведены в записке в виде
следующей таблицы:
Результаты повторяющихся расчетов
могут быть приведены в записке в виде
следующей таблицы:
Номер положения |
|
|
|
III (p.x.) IV (x.x.) I (к.п.) |
|
|
|
При построении планов скоростей и ускорений для крайнего положения механизма можно руководствоваться примерами, приведенными в разделе 3.