

1. Структурный анализ механизма
Методика и порядок кинематического и кинетостатического исследования механизма определяется в результате структурного анализа.
У механизмов с числом степеней свободы W = 1 одно начальное звено.
При кинематическом анализе за начальное звено принимается звено с заданным движением. При кинетостатическом расчете за начальное принимается звено, на котором требуется определить уравновешивающую силу. Во всех механизмах, предлагаемых в заданиях на курсовой проект, задано движение кривошипа и требуется определить уравновешивающую силу на кривошипе. Поэтому за начальное звено для всех схем механизмов принимаем кривошип.
После выделения начального звена и стойки необходимо оставшуюся кинематическую цепь, образованную звеньями механизма, разбить на группы Ассура.
Пример структурного анализа механизма приведен в разделе 6.1.
Дальнейшее исследование механизма проводят по группам Ассура.
Кинематическое исследование начинают с начального звена (кривошипа) и далее рассматривают группы Ассура в порядке присоединения их к начальному звену и стойке.
Кинетостатический расчет начинают с последней присоединенной группы Ассура и заканчивают рассмотрением начального звена (т.е. порядок силового расчета обратен порядку присоединения групп Ассура к начальному звену и стойке).
Построение положений механизма
2.1. Крайние положения механизма
Крайним положением механизма называется положение, в котором выходное звено механизма занимает крайнее положение, т.е. положение, из которого оно может двигаться только в одном направлении. Рассмотрим построение крайних положений для некоторых механизмов.
Крайние положения кривошипно-ползунного механизма (рис. 1)

Правое крайнее положение (ПКП) ползун 3 займет, когда кривошип 1 и шатун 2 вытянутся в одну прямую линию (АС). При этом точку С получим, делая засечку из точки А радиусом (АВ+ВС) на оси Х-Х направляющих. Точка В кривошипа займет в этом случае положение В. Левое крайнее положение (ЛКП) ползун займет, когда шатун с кривошипом совместятся на одной прямой (ВС). При этом точку С получим, делая засечку из точки А радиусом (ВС – АВ) на оси Х-Х направляющих. Точка В кривошипа займет соответственно положение В.
В механизмах двигателей внутреннего сгорания (задания 12, 13, 14) крайние положения механизма условно следует определять по правому ползуну. Крайние положения левого ползуна в задании 13 можно не находить.
К

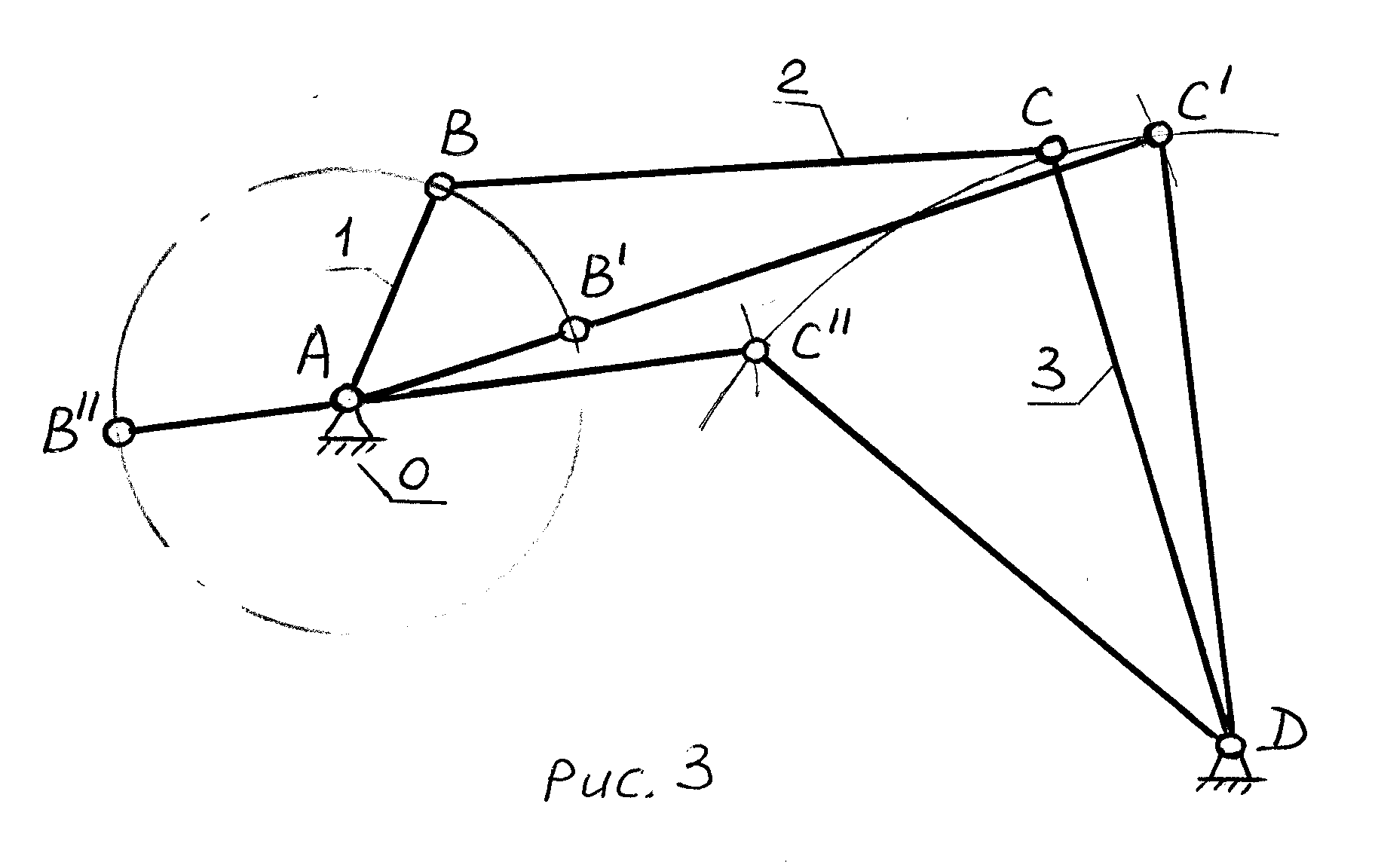
Крайние положения механизма шарнирного четырехзвенника (рис.3) соответствуют крайним положениям коромысла 3 - СD и СD. Эти положения получаются, когда кривошип 1 и шатун 2 располагаются на одной прямой, соответственно вытягиваясь или складываясь. Поэтому для определения точки С ,радиусом (АВ+ВС) делаем засечку из точки А на дуге радиуса СD. При этом точка В займет положение В. Точку С получим, делая засечку радиусом (ВС-АВ) из точки А на дуге радиуса СD. Точка В займет положение В.
В многозвенных механизмах станков, прессов и компрессоров крайние положения следует определять по крайним положениям ведомого ползуна, к которому приложена заданная сила F .
В большинстве заданий построение выполняется методом засечек. Однако следует иметь в виду, что в некоторых механизмах крайние положения зависят от траектории движения кинематической пары, которой последняя группа Ассура присоединяется к промежуточному механизму.
Так в механизме листоштамповочного пресса (задание № 9) для нахождения крайних положений ведомого ползуна 5 (рис.4) следует построить траекторию центра шарнира С, через который движение передается последующим звеньям. Для этого разбиваем окружности точки В кривошипа на 12 равных частей, начиная деление от произвольного положения точки В. Для каждого из 12 положений кривошипа строим положения звеньев 2 и 3, полученные точки С (1,2,3,…..) соединяем плавной кривой. Крайнее верхнее и крайнее нижнее положения ползуна получим, если отыщем такие точки на оси направляющих Х-Х, которые будут являться центрами дуг радиуса ЕС, касательных к траектории точки С (шатунной кривой) соответственно сверху и снизу, проведенных из точек С и С.
При необходимости таким же методом могут быть найдены крайние положения левого ползуна в задании 13.