Министерство образования Республики Беларусь
Белорусский национальный технический университет
Кафедра «Конструирование и производство приборов»
Курсовой проект
по дисциплине «Детали и механизмы приборов»
Тема: Механизм суммирующий
Разработал:
студент 3 курса гр. 113228
Проверил: Новиков А.А.
Минск 2010
Содержание:
Введение……………………………………………………………………..………………………………….5
1.Анализ существующих конструкций…………………………………………….………………..6
2.Описание ипринцип действия спроектированного механизма……………………9
3.Расчеты, подтверждающие работоспособность конструкции……………………10
4.Расчет червячной передачи…………………………………………………………………………11
5.Расчет передачи винт-гайка…………………………………………………………………………13
а)Расчет работоспособности передачи……………………………………………………......13
б)Проверка винта на устойчивость…………………………………………………………………14
в)Проверка винта на прочность……………………………………………………………………..14
6.Расчет редуктора………………………………………………………………………………………….16
7.Расчет работоспособности вала…………………………………………………………………..17
а)расчет вала на статическую прочность………………………………………………………..17
б)расчет вала на жесткость………………………………………………………………………………18
8.Расчет грузоподъемности подшипников качения……………………………………….20
9.Расчет штифтового соединения………………………………………………………………….22
10.Расчет шпоночного соединения……………………………………………….………………..23
11.Расчет направляющих скольжения…………………………………………..………………..24
Введение:
Суммирующие механизмы предназначены, как правило, для расширения диапазона настройки кинематических цепей в различных приборах , машинах и станках. Они применяются для создания на одном исполнительном звене механизма нескольких элементарных движений и позволяют изменять скорость каждого элементарного движения, не изменяя скорости остальных слагаемых движений.
В качестве суммирующих механизмов используются дифференциальные, планетарные, червячные, винтовые, реечные передачи. Получение суммирующих движений обеспечивается сообщением одному из звеньев двух или более степеней свободы. Поэтому в суммирующих механизмах всех типов имеется два или несколько входных звена и одно выходное звено, на котором получается алгебраическая сумма движений.
Суммирование движений на одном и том же исполнительном звене в станках применяется для сложения формообразующих движений между собой.
Суммирование движений используется в следующих случаях:
когда исполнительному звену необходимо сообщить периодическое вспомогательное движение без прекращения движения формообразования;
при получении одной и той же кинематической группой звеньев движений от двух двигателей для рабочих и холостых ходов.
1.Анализ существующих конструкций:
При разработке новых механизмов для начала необходимо
проанализировать существующие механизмы такого же типа. Примерами суммирующих механизмов могут быть :
а) Рулевое управление автомобиля (на примере автомобиля ГАЗ-53):
В рулевое управление встроен суммирующий механизм (суммирующий угол поворота рулевого колеса и угол подруливания). Механическая связь между рулевым колесом и управляемыми колёсами в любой ситуации осуществляется через суммирующий механизм. При серьёзных неисправностях этой системы блокируется вал электродвигателя суммирующего механизма. Это предотвращает некорректную работу системы.
Необходимость увеличения или уменьшения угла поворота управляемых колёс определяется блоком управления. Блок управления управляет электродвигателем, который приводит один из элементов суммирующего механизма. Угол поворота колёс равен сумме угла подруливания, заданного суммирующим механизмом, и угла поворота рулевого колеса, заданного водителем.
Суммирующий механизм позволяет:
– увеличить угол поворота колёс, заданный водителем поворотом рулевого колеса (подруливание в направлении поворота),
– уменьшить угол поворота колёс, заданный водителем поворотом рулевого колеса (подруливание в противоположном направлении),
– повернуть колёса без поворота рулевого колеса водителем.
Рулевое управление автомобиля ГАЗ-53 состоит из рулевого механизма с валом рулевого колеса, рулевой колонки и рулевого натяга.
Рабочей парой рулевого механизма являются глобоидальный червяк и трехгребневый ролик.
Устройство рулевого механизма показано на рисунке :

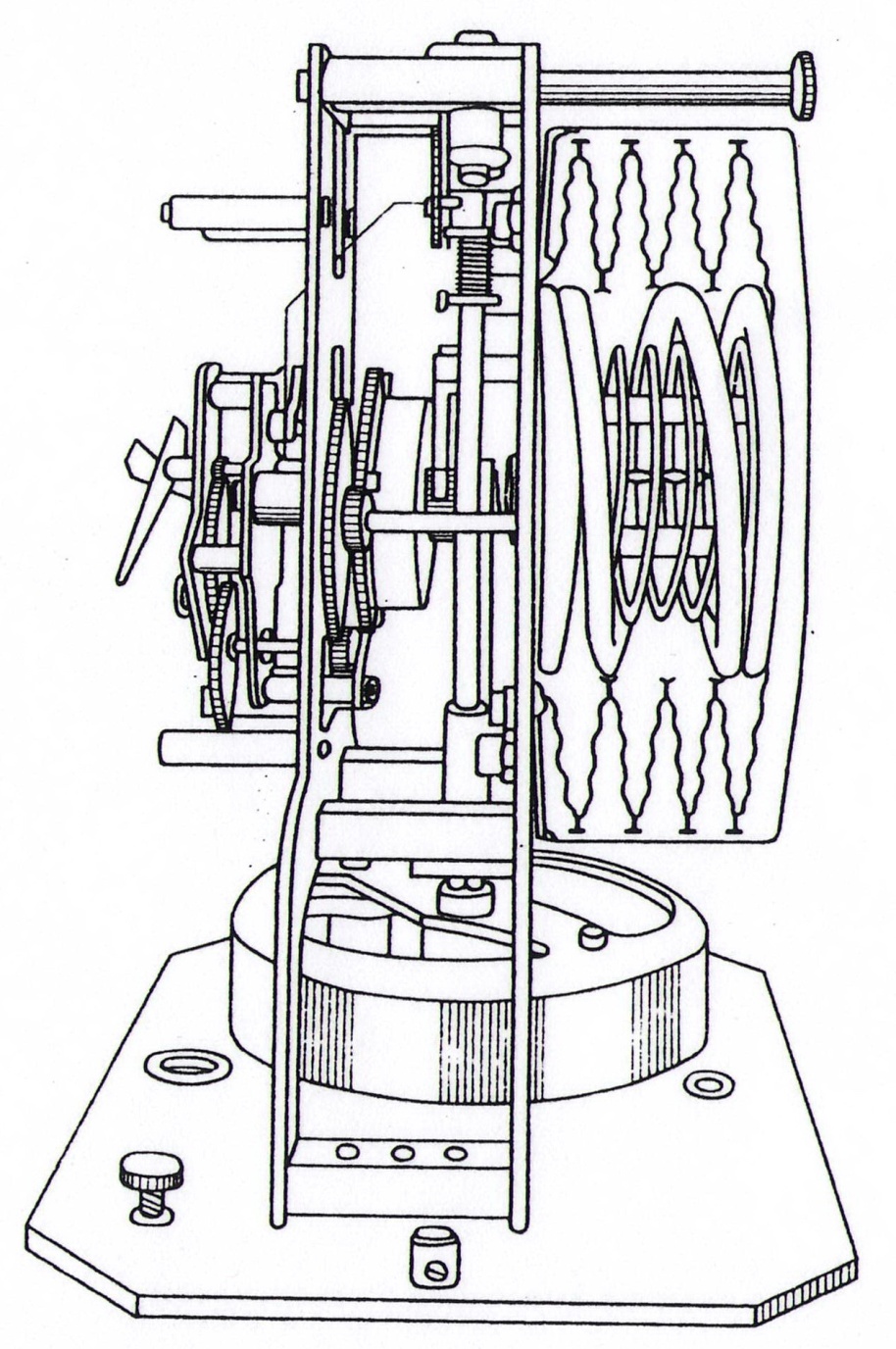
б) Часы (на примере швейцарских «вечных» часов «Атмос»):
Цилиндрический сосуд в задней части прибора заполнен этилхлоридом и герметически закрыт. В сосуде находятся металлические мехи, составленные из круговых мембран, причем мехи растягиваются пружиной. Если в комнате повышается температура, то этилхлорид расширяется и сжимает мехи. При понижении температуры мембранная пружина возвращает мехи в первоначальное положение. Движение мехов передается на вал заводного механизма барабана пружины обычных часов: