1.2. Математическое описание электропривода с асинхронным двигателем и разомкнутой системой регулирования в среде matlab- Simulink
В учебнике [Л1] приведена исходная система уравнений для проекций пространственных векторов, в которой действуют векторы, записанные в неподвижной системе координат x-y, и которые вращаются с угловой скоростью 0эл относительно неподвижной системы координат, и векторы в системе координат d-q , которые вращаются с угловой скоростью р, равной частоте роторной ЭДС, относительно системы координат, вращающейся вместе с ротором:

Для дальнейшего использования их надо привести все переменные к одной системе координат.
Описание в неподвижной системе координат х-у.
Для получения этого описания надо в исходном уравнении перейти от переменных, записанных в системе d-q, связанной с ротором, к переменным в системе, связанной со статором.. На примере потокосцепления ротора этот переход имеет вид
![]()
В результате уравнения в системе координат х-у получаются в виде

Из двух последних уравнений можно записать
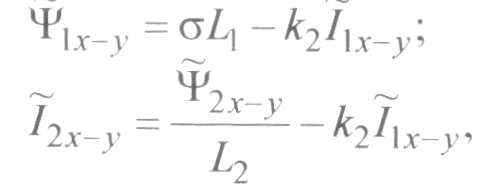
Подстановка этих выражений в два первых равенства системы позволяет после перехода к проекциям на оси координат х-у получить формулы, для построения структурной схемы в неподвижной системе координат:

Эти выражения дополняются формулами для электромагнитного момента и основного уравнения механики:

![]()
Соответствующая
структурная схема приведена на рис.1.
Входными воздействиями являются проекции
пространственного вектора задания
напряжения на статоре
![]() ;
;
![]() и момент нагрузки Mc.
Выходными переменными служат проекции
тока статора и потокосцепления ротора
на оси неподвижной системы координат
и момент нагрузки Mc.
Выходными переменными служат проекции
тока статора и потокосцепления ротора
на оси неподвижной системы координат
![]() ,
,![]()
![]() .
Их амплитудные значения могут быть
вычислены по формулам
.
Их амплитудные значения могут быть
вычислены по формулам
![]() и
и
![]() .
.
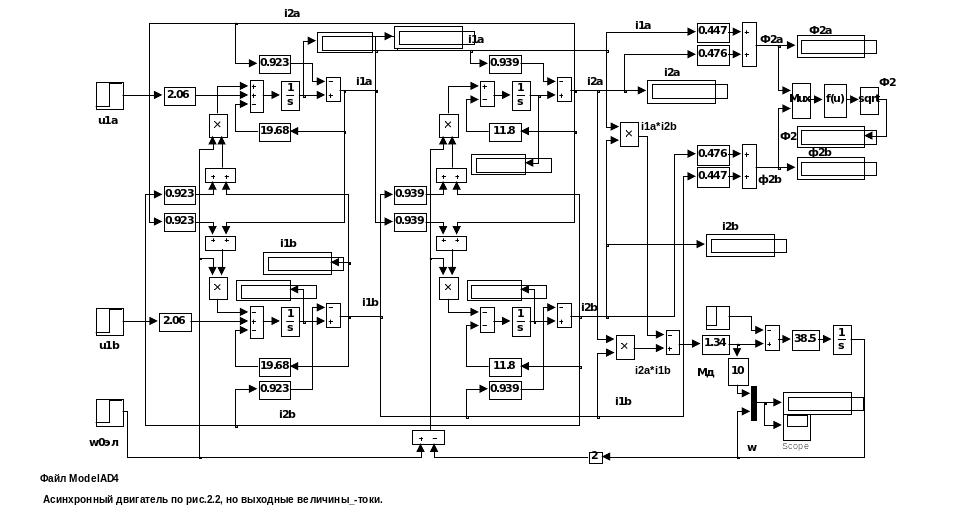
Расчетная схема асинхронного двигателя в неподвижной системе координат, выполненная в среде MATLAB Simulink, со значениями параметров, приведенными в [Л1] приведена на рис.2.
1.2.2. Описание электропривода с асинхронным двигателем в системе координат α-β, вращающейся с синхронной скоростью.
В
тех случаях, когда по тем или иным
причинам целесообразнее работать с
моделью, выполненной во вращающейся
системе координат, можно воспользоваться
математическим описанием, приведенным
в [Л1] в виде структурной схемы рис.2.2, на
которой выходными переменными являются
проекции потокосцеплений статора и
ротора . В отличие от этого в структурной
схеме рис.4 выходными переменными
являются проекции токов статора и
ротора. Для получения этой структурной
схемы надо воспользоваться системой
уравнений (1.23) в [Л1], записанной в системе
координат α-β и в первые два равенства
подставить выражения для потокосцеплений.
После перехода к проекциям векторов на
оси координат и введения обозначений
![]() и
и
![]() будет получена система уравнений:
будет получена система уравнений:
. Рис.1.
Структурна схема асинхронного двигателя
в неподвижной системе координат
Рис.1.
Структурна схема асинхронного двигателя
в неподвижной системе координат

Рис.2. Расчетная схема асинхронного двигателя в неподвижной системе координат.
Файл в Simulink’е: AD_nepodw_sk
![]()
![]()
![]()
![]()
по которой построена структурная схема рис.4. Электромагнитный момент двигателя рассчитывается по формуле (2.10) в [Л1]:
![]()
В структурной схеме не зафиксировано расположение вращающейся системы координат относительно вращающейся с той же скоростью системы пространственных векторов. Частным случаем является направление вектора напряжения по оси α, когда u1α=U1, u1β=0.
 Рис.3.Структурная
схема асинхронного двигателя во
вращающейся системе координат при
произвольном повороте системы координат
относительно системы векторов
Рис.3.Структурная
схема асинхронного двигателя во
вращающейся системе координат при
произвольном повороте системы координат
относительно системы векторов
Рис.4.
Расчетная схема асинхронного двигателя
во вращающейся системе координат/
Файл
в
Simulink’е:
Model AD4