

МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение высшего
профессионального образования
«Санкт-Петербургский государственный электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)»
(СПбГЭТУ)
КОНСПЕКТ ЛЕКЦИЙ
Дисциплины
Теория автоматических систем преобразования энергии
Для подготовки магистров по программе
140452. 68 "Автоматизированные электромеханические комплексы и системы" Санкт-Петербург
2012
1. Расчет и исследование на математической модели системы двухзонного регулирования скорости электропривода с двигателем
постоянного тока независимого возбуждения
1.1. Задачи двухзонного регулирования скорости.
1.2. Структурная и расчетная схемы двигателя постоянного тока независимого возбуждения.
1.3. Структурная и расчетная схемы двигателя постоянного тока независимого возбуждения.
1.4. Структурная и расчетная схемы системы двухзонного регулирования скорости двигателя постоянного тока независимого возбуждения.
СИСТЕМА ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ
ЭЛЕКТРОПРИВОДА
Регулирование скорости двигателя путем изменения потока возбуждения применяется в основном в системах двухзонного регулирования, в которых

Рис.1
часть
полного диапазона регулирования до
номинальной (основной) скорости
обеспечивается за счет изменения
напряжения на якоре от нуля до номинального
значения при номинальном потоке
возбуждения, а регулирование в верхней
части диапазона при значениях скорости
выше основной путем воздействия на
поток при постоянном напряжении на
якоре или при постоянной ЭДС двигателя.
Структурная схема двигателя приведена
на рис.1.Возможности двигателя, работающего
в системе двухзонного регулирования,
могут быть охарактеризованы графиками
рис. 2. По оси абсцисс графиков отложены
значения скорости в относительных
единицах
![]() ,
где
,
где
![]() =
=![]() -
основная скорость, а по оси ординат —
предельные значения длительно допустимых
тока якоря
-
основная скорость, а по оси ординат —
предельные значения длительно допустимых
тока якоря
![]() ,
момента двигателя
,
момента двигателя
![]() и мощности Р, принятой в первом
приближении равной
и мощности Р, принятой в первом
приближении равной
![]() Р
= UЯIЯ.
Везде индекс «н» обозначает номинальное
значение величины. При обеспечении
требуемого режима охлаждения во всем
диапазоне регулирования скорости
длительно допустимым для двигателя
значением тока якоря является его
номинальный ток
Р
= UЯIЯ.
Везде индекс «н» обозначает номинальное
значение величины. При обеспечении
требуемого режима охлаждения во всем
диапазоне регулирования скорости
длительно допустимым для двигателя
значением тока якоря является его
номинальный ток
![]() =
1. Поскольку на всех скоростях до основной
(
=
1. Поскольку на всех скоростях до основной
(![]() )
поток остается номинальным (
)
поток остается номинальным (![]() ),
то и допустимое значение момента
двигателя остается равным номинальному
значению
),
то и допустимое значение момента
двигателя остается равным номинальному
значению
![]() .
На скоростях выше основной допустимое
значение момента уменьшается в
соответствии с выражением
.
На скоростях выше основной допустимое
значение момента уменьшается в
соответствии с выражением
![]() ,
а допустимая мощность остается постоянной.
Соответствующие графики приведены на
рис.1.
,
а допустимая мощность остается постоянной.
Соответствующие графики приведены на
рис.1.
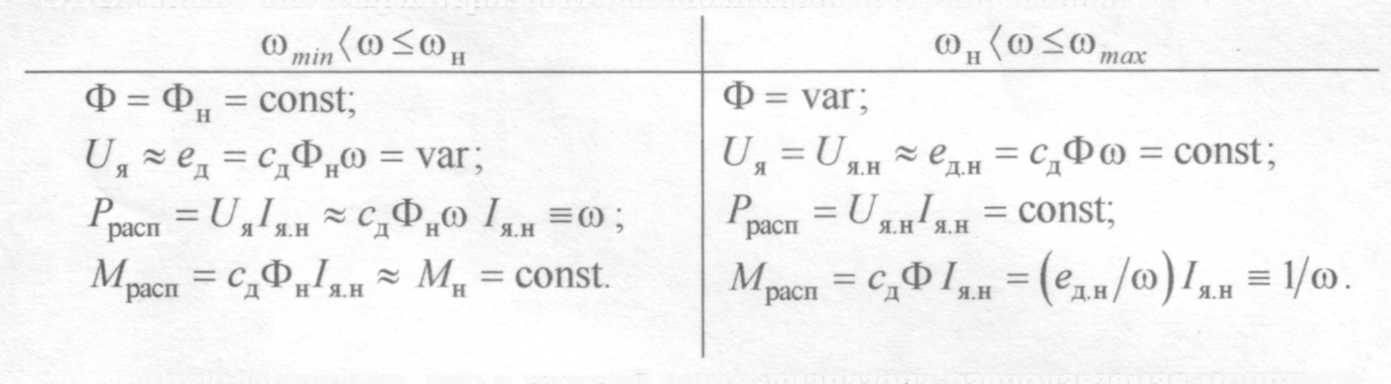
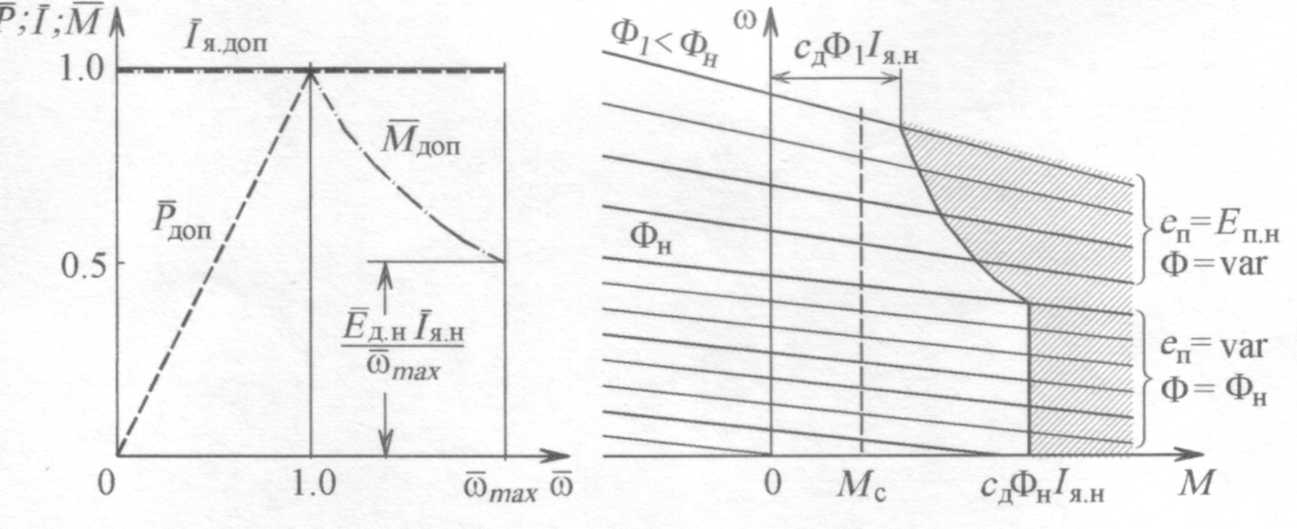 Рис.2
Рис.2
Отсюда следует, что применение двухзонного регулирования целесообразно в тех случаях, когда момент нагрузки механизма на верхних скоростях меньше, чем на скоростях ниже основной. В этом случае установленная мощность двигателя получается меньшей, чем при обеспечении всего диапазона за счет изменения напряжения на якоре при Ф = Фн.
В
замкнутой системе регулирования скорости
переход от режима регулирования
напряжением к режиму регулирования
потоком возбуждения обеспечивается за
счет того, что на скоростях выше основной
с помощью специального регулятора,
воздействующего на цепь возбуждения,
поддерживается равенство ЭДС двигателя
её номинальному значению. Поскольку
ЭДС двигателя есть
![]() ,
в условиях, когда еД =
const, а значение скорости
задается входным сигналом, поток
возбуждения будет изменяться обратно
пропорционально скорости двигателя.
ЭДС преобразователя в установившемся
режиме выше ЭДС двигателя на значение
падения напряжения в якорной цепи от
тока iя. Если момент нагрузки
возрастет, то в условиях, когда скорость
и ЭДС двигателя поддерживаются постоянными
своими
,
в условиях, когда еД =
const, а значение скорости
задается входным сигналом, поток
возбуждения будет изменяться обратно
пропорционально скорости двигателя.
ЭДС преобразователя в установившемся
режиме выше ЭДС двигателя на значение
падения напряжения в якорной цепи от
тока iя. Если момент нагрузки
возрастет, то в условиях, когда скорость
и ЭДС двигателя поддерживаются постоянными
своими
системами регулирования, возросшее падение напряжения в цепи якоря будет покрыто за счет соответствующего увеличения ЭДС преобразователя при неизменном значении потока возбуждения.
Пуск
двигателя может осуществляться под
контролем скорости или под контролем
тока якоря. Это поясняет рис.3, на котором
переменные показаны в относительных
единицах. Если в процессе пуска
поддерживается постоянным ток iЯ
=
![]() ,
то, если
,
то, если
![]() = const до момента достижения скорости
= const до момента достижения скорости
![]() в течение времени 0 – t1 (рис.
3,а,) разгон двигателя идет с постоянным
ускорением, значение которого определяется
моментом
в течение времени 0 – t1 (рис.
3,а,) разгон двигателя идет с постоянным
ускорением, значение которого определяется
моментом
![]() .
Начиная с момента времени t1
ЭДС двигателя поддерживается постоянной,
а поток возбуждения уменьшается.
Динамический момент падает, что приводит
к снижению темпа разгона привода и на
участке разгона (t1-
t2) - к отклонению
зависимости
.
Начиная с момента времени t1
ЭДС двигателя поддерживается постоянной,
а поток возбуждения уменьшается.
Динамический момент падает, что приводит
к снижению темпа разгона привода и на
участке разгона (t1-
t2) - к отклонению
зависимости
![]() от линейной. После достижения заданного
значения скорости разгон прекращается
и ток якоря становится равным значению
от линейной. После достижения заданного
значения скорости разгон прекращается
и ток якоря становится равным значению
![]() .
ЭДС преобразователя во время пуска
превышает ЭДС двигателя на постоянное
значение величины падения напряжения
в якорной цепи от пускового тока
.
ЭДС преобразователя во время пуска
превышает ЭДС двигателя на постоянное
значение величины падения напряжения
в якорной цепи от пускового тока
![]() .
Если пуск осуществляется под контролем
скорости и на входе контура скорости
действует линейно-нарастающий сигнал
(рис. 3,б), то при
.
Если пуск осуществляется под контролем
скорости и на входе контура скорости
действует линейно-нарастающий сигнал
(рис. 3,б), то при
![]() =
const момент двигателя должен оставаться
постоянным и равным
=
const момент двигателя должен оставаться
постоянным и равным
![]() .
В процессе ослабления потока возбуждения
ток якоря линейно нарастает до значения
.
В процессе ослабления потока возбуждения
ток якоря линейно нарастает до значения
![]() .
Соответственно увеличивается и ЭДС
преобразователя. Если в процессе
увеличения скорости момент
.
Соответственно увеличивается и ЭДС
преобразователя. Если в процессе
увеличения скорости момент

Рис.3
нагрузки
уменьшается, то и значение
![]() будет меньше показанного на рисунке.
Разгон с постоянным ускорением может
быть реализован лишь тогда, когда
максимальное значение якорного тока
не превышает предельно допустимого для
двигателя и преобразователя значения.
будет меньше показанного на рисунке.
Разгон с постоянным ускорением может
быть реализован лишь тогда, когда
максимальное значение якорного тока
не превышает предельно допустимого для
двигателя и преобразователя значения.
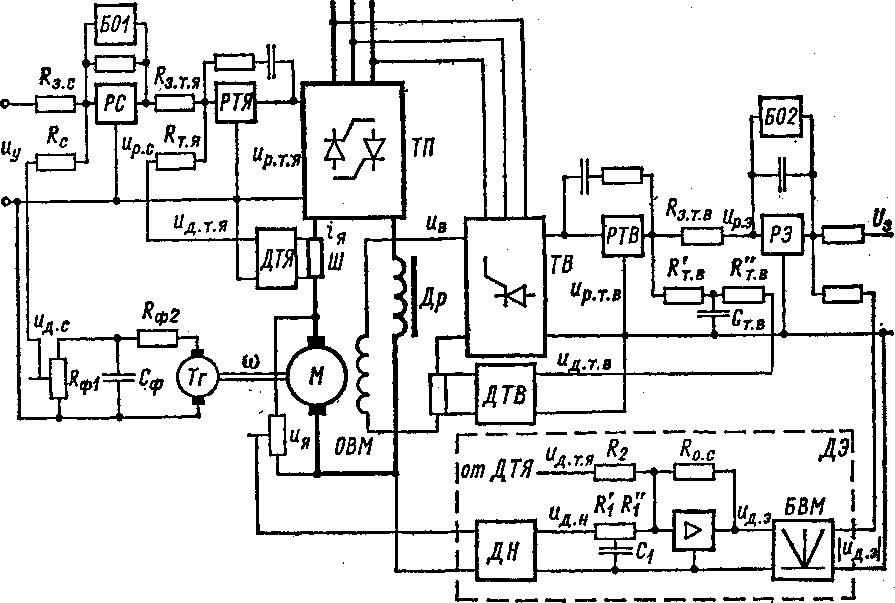
Рис.4
В показанной на рис.4 системе двухзонного регулирования двигатель М питается от тиристорного преобразователя (ТП), а его обмотка возбуждения (ОВМ) — от тиристорного возбудителя (ТВ). Система управления электроприводом включает в себя две взаимосвязанные системы: а) воздействующую на напряжение ТП систему регулирования скорости с регулятором PC и подчиненным контуром регулирования тока якоря с регулятором РТЯ. б) систему регулирования ЭДС с регулятором ЭДС РЭ и подчиненным контуром регулирования тока возбуждения с регулятором РТВ.
Подчиненный
контур регулирования тока возбуждения
замкнут по выходному напряжению датчика
тока возбуждения ДТВ, причем на
входе регулятора тока возбуждения по
каналу обратной связи предусмотрен
фильтр с постоянной времени Tф,
образованный резисторами
![]() и конденсатором Ст.в. Входным
сигналом для контура тока возбуждения
является выходное напряжение регулятора
ЭДС. Последнее ограничено на значении
и конденсатором Ст.в. Входным
сигналом для контура тока возбуждения
является выходное напряжение регулятора
ЭДС. Последнее ограничено на значении
![]() ,
соответствующем номинальному току
возбуждения, с помощью блока ограничения
БО2.
,
соответствующем номинальному току
возбуждения, с помощью блока ограничения
БО2.
На
входе регулятора ЭДС РЭ сравниваются
постоянное значение заданного напряжения
Uз с напряжением
датчика ЭДС ДЭ. Этот датчик
представляет собой суммирующий усилитель,
на один вход которого через фильтр,
образованный резисторами
![]() и конденсатором С1, подается
напряжение uд.н
датчика напряжения (ДН), а на второй,
с резистором R2,
напряжение uд.т.я
датчика тока якоря (ДТЯ). Напряжение
на выходе суммирующего усилителя датчика
ЭДС может быть записано в виде
и конденсатором С1, подается
напряжение uд.н
датчика напряжения (ДН), а на второй,
с резистором R2,
напряжение uд.т.я
датчика тока якоря (ДТЯ). Напряжение
на выходе суммирующего усилителя датчика
ЭДС может быть записано в виде
![]()
где,
![]() - постоянная времени фильтра на выходе
датчика напряжения. Имея в виду, что
ид.н = кд.н ия
, ид. т = кд.т
iя, можно
получить, что сигнал на выходе датчика
ЭДС определяется как
- постоянная времени фильтра на выходе
датчика напряжения. Имея в виду, что
ид.н = кд.н ия
, ид. т = кд.т
iя, можно
получить, что сигнал на выходе датчика
ЭДС определяется как

Между
тем ЭДС двигателя связана с напряжением
на якоре и током якоря выражением
![]() .
Сравнение двух последних формул
показывает, что, выбрав
.
Сравнение двух последних формул
показывает, что, выбрав
![]() ,
,
![]() =
=![]() и
обозначив коэффициент датчика ЭДС
и
обозначив коэффициент датчика ЭДС
![]() ,
можно записать выражение для выходного
напряжения датчика ЭДС в виде:
,
можно записать выражение для выходного
напряжения датчика ЭДС в виде:
![]() Таким образом, ДЭ воспроизводит ЭДС
с запаздыванием, равным постоянной
времени якорной цепи двигателя. Так как
при изменении направления вращения
двигателя знак ил.э
меняется на противоположный, в то время
как знак сигнала на входе РЭ меняться
не должен, на выходе ДЭ предусмотрен
блок выделения модуля (БВМ).
Таким образом, ДЭ воспроизводит ЭДС
с запаздыванием, равным постоянной
времени якорной цепи двигателя. Так как
при изменении направления вращения
двигателя знак ил.э
меняется на противоположный, в то время
как знак сигнала на входе РЭ меняться
не должен, на выходе ДЭ предусмотрен
блок выделения модуля (БВМ).
Пока
двигатель работает на скорости ниже
основной, значение ЭДС двигателя меньше
номинального. Задающее напряжение Uз
выбирается равным выходному напряжению
ДЭ при номинальной ЭДС двигателя:
Поэтому при
![]() ,
выходное напряжение регулятора ЭДС
равно напряжению ограничения. Последнее
выбирается исходя из равенства
,
выходное напряжение регулятора ЭДС
равно напряжению ограничения. Последнее
выбирается исходя из равенства
![]() .
Благодаря этому при
,
когда ЭДС двигателя меньше номинальной,
ток возбуждения двигателя поддерживается
равным номинальному. Когда скорость
двигателя станет примерно равной
,
а ЭДС двигателя достигнет номинального
значения, напряжения U3
и
.
Благодаря этому при
,
когда ЭДС двигателя меньше номинальной,
ток возбуждения двигателя поддерживается
равным номинальному. Когда скорость
двигателя станет примерно равной
,
а ЭДС двигателя достигнет номинального
значения, напряжения U3
и
![]() сравняются, регулятор РЭ выйдет из
ограничения и контур регулирования ЭДС
замкнется. С этого момента система
перейдет в режим поддержания постоянства
ЭДС двигателя. Дальнейшее увеличение
скорости будет происходить за счет
ослабления потока возбуждения при ЭДС
двигателя, равной номинальному
значению.
сравняются, регулятор РЭ выйдет из
ограничения и контур регулирования ЭДС
замкнется. С этого момента система
перейдет в режим поддержания постоянства
ЭДС двигателя. Дальнейшее увеличение
скорости будет происходить за счет
ослабления потока возбуждения при ЭДС
двигателя, равной номинальному
значению.
При работе системы на скорости ниже основной, поток возбуждения остается постоянным и структура системы не отличается от структуры однозонной системы подчиненного регулирования, которая при малых входных сигналах может рассматриваться как линейная. Структура контура тока якоря ничем не отличается от таковой и в зоне, где скорость больше основной.
Для рассмотрения вопросов динамики других контуров в зоне, где скорость больше основной, обратимся к структурной схеме рис.4. Поскольку в этом режиме поток возбуждения, входящий в выражения для ЭДС двигателя и электромагнитного момента, меняется, система должна рассматриваться как нелинейная.
При
настройке
контура скорости
на оптимум по модулю или на симметричный
оптимум надо выполнить его линеаризацию.
При линеаризации в рабочей точке в
контуре появляется сомножитель
![]() ,
значение которого определяется выбором
начального режима и может принимать
значения от
,
значение которого определяется выбором
начального режима и может принимать
значения от
![]() до
до
![]() .
Обычно, настраивая контур скорости на
ОМ, за настроечный режим принимают режим
работы на основной скорости, когда
.
Обычно, настраивая контур скорости на
ОМ, за настроечный режим принимают режим
работы на основной скорости, когда
![]() .
Тогда
.
Тогда
![]() ,
где
,
где
![]() -
суммарная малая постоянная времени
контура скорости.
-
суммарная малая постоянная времени
контура скорости.
В контуре регулирования тока возбуждения линеаризованный объект регулирования контура характеризуется выражениями
![]()
где
![]()
![]() - постоянная времени возбуждения,
определенная в начальном режиме по
касательной к характеристике намагничивания
- постоянная времени возбуждения,
определенная в начальном режиме по
касательной к характеристике намагничивания
![]() ,
в том же режиме. Передаточная функция
объекта получается в виде апериодического
звена.
В качестве регулятора тока возбуждения
применен ПИ-регулятор с фильтром, имеющим
постоянную времени Tф,
в канале обратной связи. После линеаризации
структурной схемы передаточная функция
разомкнутого контура запишется в виде
,
в том же режиме. Передаточная функция
объекта получается в виде апериодического
звена.
В качестве регулятора тока возбуждения
применен ПИ-регулятор с фильтром, имеющим
постоянную времени Tф,
в канале обратной связи. После линеаризации
структурной схемы передаточная функция
разомкнутого контура запишется в виде
![]() ,
,
а
параметры регулятора тока возбуждения
определяются как
![]() ,
,
![]()
![]() - суммарная малая постоянная времени
контура тока возбуждения. Входящая в
эту формулу
- суммарная малая постоянная времени
контура тока возбуждения. Входящая в
эту формулу
![]() -
постоянная времени фильтра, назначением
которого является компенсация влияния
запаздывания в датчике ЭДС, в котором
ЭДС двигателя определяется через сигналы
датчиков напряжения и тока якоря [Л.1].
Здесь этот вопрос не рассматривается
и предлагается положить
-
постоянная времени фильтра, назначением
которого является компенсация влияния
запаздывания в датчике ЭДС, в котором
ЭДС двигателя определяется через сигналы
датчиков напряжения и тока якоря [Л.1].
Здесь этот вопрос не рассматривается
и предлагается положить
![]() =
0. Тиристорный возбудитель описан так
же, как тиристорный преобразователь в
якорной цепи. При описанных параметрах
регулятора тока возбуждения передаточная
функция разомкнутого контура тока
возбуждения получается в виде
=
0. Тиристорный возбудитель описан так
же, как тиристорный преобразователь в
якорной цепи. При описанных параметрах
регулятора тока возбуждения передаточная
функция разомкнутого контура тока
возбуждения получается в виде
![]() .
.
Следует напомнить еще раз, что контур регулирования тока воэбуждения нелинеен и можно рассчитывать на переходный процесс, близкий к стандартному, только в точке выбранного начального режима.
При
настройке контура регулирования ЭДС
замкнутый контур регулирования тока
возбуждения описывается упрощенной
передаточной функцией
![]() .
Неизменяемая часть линеаризованного
контура ЭДС описывается как
.
Неизменяемая часть линеаризованного
контура ЭДС описывается как
![]() .
.
Для стандартной настройки на оптимум по модулю должен быть применен интегрирующий регулятор ЭДС с передаточной функцией
![]()
где
![]() - суммарная малая постоянная времени
контура ЭДС,
- суммарная малая постоянная времени
контура ЭДС,
![]()
 Рис.5
Рис.5