

Билет 22
21. Опорні пристрої балкових систем.
а) Шарнірно-рухома опора здійснює обертання навколо осі шарніра та лінійних переміщення на незначну відстань. Опора має 1 реакцію, яка направлена вздовж. 1 до опорної поверхні. б) Шарнірно-нерухома опора може обертатися навколо осі шарніра, але не здійснює лінійні переміщення. Опора має дві опорні реакції. в) Опора не здійснює обертання навколо осі шарніра та лінійні переміщення. Має 3 опорні реакції складові по осі X, Y та момент.
35. Швидкість і прискорення точок обертового тіла.
При обертальному русі тіла навколо нерухомої осі усі його точки, що лежать на осі обертання, залишаються нерухомими. Решта точки обертового тіла описують кола навколо нерухомої осі в площинах, перпендикулярних до осі, з центром на цій осі.
Кут φ називається кутом повороту тіла. Кут повороту вимірюється в радіанах і відповідає певному положенню тіла. Для визначення положення обертового тіла в кожен даний момент служить рівняння, що виражає кут повороту як функцію від часу:
Зміна кута повороту визначається кутовою швидкістю. Середньою кутовою швидкістю обертового тіла називається відношення приросту кута повороту до часу t, протягом якого це прирощення відбулося:
Билет 23
22. Момент сили відносно точки.
Момент сили відносно точки M – векторна фізична сила, що дорівнює векторному добутку радіуса вектора r, проведеного з точки, відносно якої відшукується момент сили, у точку прикладання сили та вектора сили F. M=F*r
37. Кінематичні графіки і зв’язок між ними.
Розг.
кінематичні графіки для рівномірного
руху. Незалежно від того, є вона прямол.
або кривол., ми маємо для нього наступні
р-ня: S=S0+Vt,
V=const.
З цього р-ня випливає, що графік перем.
рівномірного руху є пряма: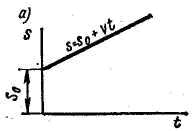
Г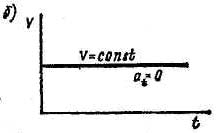 рафік
швидкості зоб. прямою лінією, парал. осі
абсцис:
рафік
швидкості зоб. прямою лінією, парал. осі
абсцис:
Розгл.
кінемат. графіки для равноперемін. руху.
Яким би не було це рух для нього справд.
р-ня:V=V0+at; S=V0t+
Графік перем. рівноперем. руху є криволін. – параболічним.
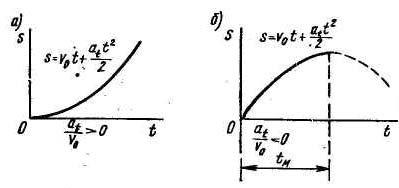
Зв’язок для рівномірного руху графік швидкості зобр. лінією, паралельні осі абсцис, а графік відстані – прямою нахилою лінією. Для рівноперем. Руху граф. приск. – пряма, графік швид. – похила пряма, а графік відстаней параболічна крива.
Билет 24
23. Рівновага просторової системи сил.
Умовами рівноваги сил є рівність нулю головного вектора R і головного моменту M0 всіх сил відносно центра зведення: R= Fk=0; M0= M0(Fk)=0.
36. Поняття про плоскопаралельний рух твердого тіла.
Рух тв. тіла, при якому всі його точки переміщуються паралельні деякій нерухомій площині. Вивч. п. р. зводиться до вивч. руху незмінної плоскої фігури в її площині.
Билет 25
24. Центр паралельних сил та його координат.
Центр
паралельних сил – точка, через яку
проходить лінія дії рівнодійної системи
паралельне сил Fk
при
будь-якому повороті всіх цих сил біля
їх точок додатна в одну і ту ж сторону
і на один і той ж кут. Координати центра
паралельних сил
визн.
формулами:X0=
38. Основні поняття і аксіоми динаміки.
Динаміка – розділ теорет. мех., який вивчає залежність між мех. рухом тіл і діючих на них сил.
Аксіоми: