

18. Определение скорости и ускорения точки при координатном способе задания движения
Связь векторного способа задания движения и координатного дается соотношением
![]()
Из определения скорости

Проекции скорости на оси координат равны производным соответствующих координат по времени:
Модуль и направление скорости определяются выражениями
Из определения ускорения

Проекции ускорения на оси координат равны вторым производным соответствующих координат по времени
![]()
Модуль и направление ускорения определяются выражениями

19. Фывфывфывфвфывфыв
Касательное ускорение указывает, насколько быстро изменяется скорость тела по модулю:
|
Вектор ![]() направлен
по касательной к траектории.
направлен
по касательной к траектории.
Нормальное ускорение указывает, насколько быстро скорость тела изменяется по направлению.
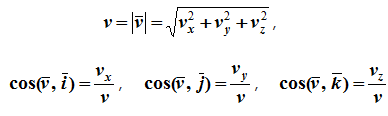
Криволинейное движение можно представить как движение по дугам окружностей (рис. 1.1.6).
|
Рисунок 1.1.6. Движение по дугам окружностей |
Нормальное ускорение зависит от модуля скорости υ и от радиуса R окружности, по дуге которой тело движется в данный момент:
|
Вектор ![]() всегда
направлен к центру окружности (см. §1.6).
всегда
направлен к центру окружности (см. §1.6).
Из рис. 1.1.5 видно, что модуль полного ускорения равен
|
Таким образом,
основными физическими величинами в
кинематике материальной точки являются
пройденный путь l,
перемещение ![]() ,
скорость
,
скорость ![]() и
ускорение
и
ускорение ![]() .
Путь l является
скалярной величиной. Перемещение
,
скорость
и
ускорение
– величины
векторные. Чтобы задать векторную
величину, нужно задать ее модуль и
указать направление. Векторные величины
подчиняются определенным математическим
правилам. Вектора можно проектировать
на координатные оси, их можно складывать,
вычитать и т. д.
.
Путь l является
скалярной величиной. Перемещение
,
скорость
и
ускорение
– величины
векторные. Чтобы задать векторную
величину, нужно задать ее модуль и
указать направление. Векторные величины
подчиняются определенным математическим
правилам. Вектора можно проектировать
на координатные оси, их можно складывать,
вычитать и т. д.
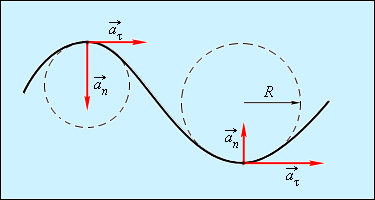
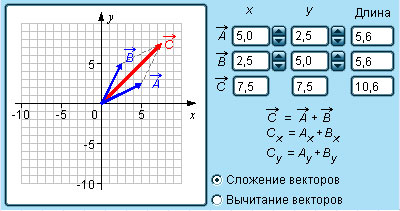
![]()
|
Модель. Вектор и его проекции на координатные оси |
|
Модель. Сложение и вычитание векторов |
20. Угловая скорость и угловое ускорение
Угловой
скоростью называется
векторная величина, равная первой
производной угла поворота тела по
времени:
![]() Вектор ω направлен
вдоль оси вращения по правилу правого
винта, т. е. так же, как и вектор dφ (рис.
2). Размерность угловой скорости dim ω =
Т-1,
а ее единица — радиан в секунду
(рад/с).
Линейная
скорость точки (см. рис. 1)
Вектор ω направлен
вдоль оси вращения по правилу правого
винта, т. е. так же, как и вектор dφ (рис.
2). Размерность угловой скорости dim ω =
Т-1,
а ее единица — радиан в секунду
(рад/с).
Линейная
скорость точки (см. рис. 1)
![]()

Рис.1
т.е
v=ωR
В
векторном виде формулу для линейной
скорости можно написать как векторное
произведение:
![]() При
этом модуль векторного произведения,
по определению, равен ωRsin(ω, R),
а направление совпадает с направлением
поступательного движения правого винта
его вращения от ω к R.
При
этом модуль векторного произведения,
по определению, равен ωRsin(ω, R),
а направление совпадает с направлением
поступательного движения правого винта
его вращения от ω к R.
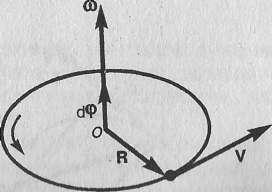
Рис.2
Если ω=const, то вращение равномерное и его можно характеризовать периодом вращения Т - временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2π. Так как промежутку времени Δt=Т соответствует Δφ=2π, то ω=2π/T, откуда
Т = 2π/ω.
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
n= 1/T = ω/(2π),
откуда
ω = 2πn.
Угловым
ускорением называется
векторная величина, равная первой
производной yгловой скорости по
времени:
![]()
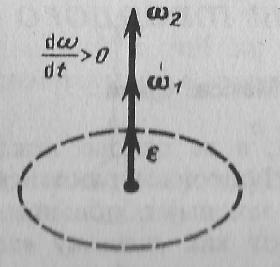
Рис.3
При вращении тела вокруг неподвижной оси вектор углового ускорения ε направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор ε сонаправлен вектору ω (рис. 3), при замедленном - противонаправлен ему (рис. 4).

Рис.4
Тангенциальная
составляющая ускорения aτ=dv/dt
, v = ωR и
![]() Нормальная
составляющая ускорения
Нормальная
составляющая ускорения
![]() Значит,
связь между линейными (длина пути s,
пройденного точкой по дуге окружности
радиуса R, линейная скорость v, тангенциальное
ускорение аτ,
нормальное ускорение аn)
и угловыми величинами (угол поворота
φ, угловая скорость ω, угловое ускорение
ε) выражается следующими формулами:
Значит,
связь между линейными (длина пути s,
пройденного точкой по дуге окружности
радиуса R, линейная скорость v, тангенциальное
ускорение аτ,
нормальное ускорение аn)
и угловыми величинами (угол поворота
φ, угловая скорость ω, угловое ускорение
ε) выражается следующими формулами:
s = Rφ, v = Rω, аτ = R?, an = ω2R.
В случае равнопеременного движения точки по окружности (ω=const)
ω = ω0 ± ?t, φ = ω0t ± ?t2/2,
где ω0 — начальная угловая скорость.